机器人的开发正在向前发展:前几天,日本机器人技术公司发布了新设备的开发结果。 这是一种可以爬上垂直楼梯,识别扶手和其他元素的机器人,还可以爬一些
其他垂直表面 。
四臂机器人现在是一种非常流行的趋势。 波士顿动力公司开始开发首批此类设备之一。 四个操纵器使机器人能够保持平衡并穿越地形不平坦的相当复杂的区域。 不仅在开发硬件,而且还在开发用于机器人的软件。

然而,机器人世界中很少有代表能够应付高水平的障碍。 首先,这些是Boston Dynamics和Honda的机器人系统。 机器人的问题是难以保持平衡:在垂直运动中,机构的重心向后偏斜,机器人很难撑下。
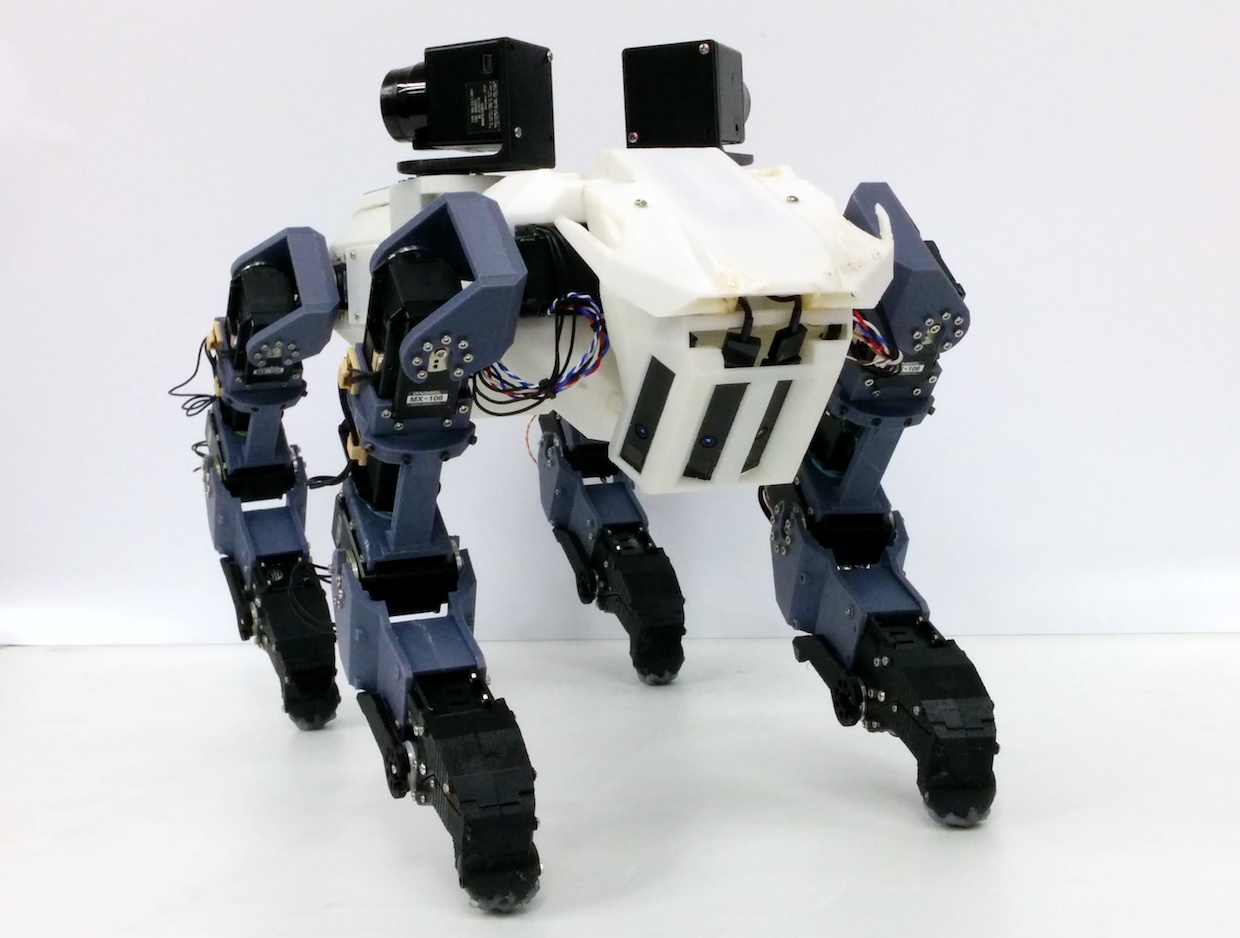
日本人相对简单地解决了这个问题-他们为后代配备了简单的握把,这些握把根本不会阻止设备在平坦的表面上行走,但会在尝试爬上垂直梯子时帮助保持下去。 每个“腿”操纵器都有五个自由度。 机械手配有压力,力和触摸传感器。 有特殊的闩锁,可以在移动过程中将机械手固定在楼梯上。
激光测距仪位于背面,头部配有四个摄像头,可帮助机器人在太空中导航。 传感器可以确定到各种物体的距离。 来自所有传感器的信息进入控制单元,在此进行处理。 此外,特殊算法可识别扶手和楼梯梯级,向您显示机器人可以在何时抓住支撑物。

该解决方案的缺点是必须为每个单独的梯子训练机器人。 尽管如此,日本机器人技术希望在不久的将来改善其发展。 机器人的移动速度相对较慢(上面的视频快了2倍),因此必须解决此问题。
如果一切顺利,将会有新的机器人可以在几乎任何类型的表面上移动。 您可以将它们用于不同目的-地面侦察,寻找受地震或其他灾难影响的人员,研究工业设施等。