在2019年4月16日的Skolkovo机器人与AI论坛框架内,莫斯科在俄罗斯主办了关于机器人操作系统的第一次会议。机器人操作系统是一种全球流行的软件框架,实现了构建复杂机器人的基本算法。 该活动为所有团队的发展提供了强大的动力。 我们投入了我们最爱的东西-发展! 因此,直到现在,我们才有时间巩固会议的独特材料,并由演讲者传播以供出版。
在俄罗斯最大的机器人技术论坛的访问者中,有150多位已经使用ROS或计划在其项目中使用ROS的工程师。 对于俄罗斯ROS开发人员小团体的第一次会议来说,这是一个好结果。 我们努力成为全球运动的一部分-数百名参与者已经在国外收集了类似的活动。
第二次俄罗斯ROS聚会将于2019年11月30日举行 。
再次感谢所有来此并花时间研究报告和棘手问题的人。 所有这些表明,社区对ROS的发展非常感兴趣,因此有必要继续定期开展工作以召开此类会议。 当我们分享最佳实践并改进世界上最常见的机器人开发工具之一-机器人操作系统时,我们就会成长。
我们的演讲者是实践开发人员,他们的主题来自他们的真实经验。 因此,本出版物中介绍的材料反映了在现有和正在进行的项目中使用ROS的可能性。
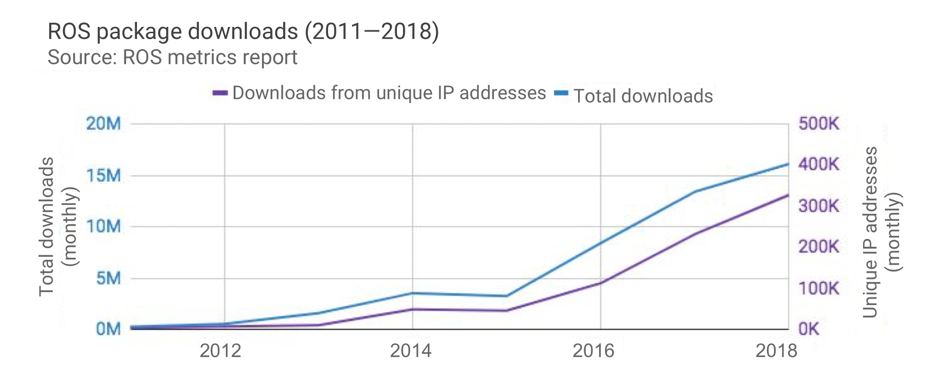
当前,全球ROS社区是世界上最大,最开放的机器人社区。 自2014年以来,ROS的下载量几乎增加了6倍! 显然,对于那些创建机器人的人来说,这是最重要的工具,因此我们在Sberbank机器人实验室为所有与我们分享ROS价值观并希望交流经验的人提供支持。
如果您正在为机器人开发新算法,那么为ROS编写一个软件包是将它们集成到现有机器人中并向全世界展示的一个很好的解决方案。
如果您刚刚开始机器人技术之旅,那么学习ROS将有助于您掌握现代技术并融入社区。
第一次ROS见面会充满了有趣的报道。 但由于并非所有人都能参加莫斯科的活动,因此我们为您发布了视频和演示幻灯片:
ROS简介。 意识形态和现状。Sberbank机器人实验室的Alexey Burkov。该报告讨论了ROS的出现,其概念和开发人员以及全球社区中该框架的当前状态。
链接到演示幻灯片。
以Eurobot为例,在竞争性机器人技术中使用ROS的经验。Sberbank机器人实验室的Alexey Postnikov。该报告讨论了使用ROS使用Aruco标记的机器人定位系统。
链接到演示幻灯片。
顺便说一句,您可以加入由Sberbank机器人实验室支持的SetUp团队参加Eurobot竞赛-这是学习机器人技术和ROS并将技能付诸实践的好方法。 要参加,请写信给robotics@sberbank.ru。SLAM和激光激光雷达导航。Sberbank机器人实验室的Alexey Burkov。我们如何使用ROS使用SLAM和路径规划器来导航快递机器人的故事涉及以下主题:
- 使用Gmapping算法构建房间地图和机器人本地化。
- 通过AMCL算法将机器人定位在地图上。
- 通过MoveBase和DWA进行机器人导航。
链接到演示幻灯片。
您可以在Sberbank机器人实验室获得有关快递和ROS主题的实习机会,为此,请写信给robotics@sberbank.ru。机器人路径规划器以Eurobot为例,考虑了给定的地图和动态障碍物。Sberbank机器人实验室Alexander Gamayunov。基于A *,T *,Costmap服务器,Global Planner,STM32驱动程序和Ramer-Douglas-Pecker算法创建自己的路线规划器以参加国际Eurobot竞赛的历史。
链接到演示幻灯片。
在无人驾驶水下无人飞行器“ Cousteau 2”的控制系统中使用ROS的经验UCM Hydronautics的Timur Akhtyamov。水下航行器仿真。 使用状态机SMACH。 ROS包装器序列。 QR码的触发器。 Roslaunch API,用于启动和停止来自Python代码的启动文件。 操作系统启动时自动启动节点。
链接到演示幻灯片。
我们VIST Group的ROS的BelAZ创建了采矿解决方案。VIST集团Elizaveta Shpiev。VIST集团如何使用ROS创造智慧事业的故事。
链接到演示幻灯片。
在ROS中测试代码是如何构建无人驾驶汽车并且不破坏任何东西。奥列格·希皮特科(Oleg Shipitko),Visillect。在ROS中使用Google Test(C ++),Unittest(Python)和Rostest进行测试的故事。
链接到演示幻灯片。
机器人中的计算机视觉是操纵器根据RGBD摄像机的数据捕获事物。Sberbank机器人实验室的Alexander Syomochkin。关于如何使用带操纵器的机器人使用RGBD相机捕获对象。
链接到演示幻灯片。
世界统一的ROS开发的统一。VIST集团Konstantin Konogorsky。VIST Group知识分子事业的故事的延续,或如何结合密不可分。
链接到演示幻灯片。
ROS Docker在Linux计算机上启动虚拟ROS映像。Sberbank机器人实验室的Alexander Syomochkin。关于使用Docker在Linux上创建和运行虚拟ROS映像的报告。
链接到演示幻灯片。
什么设备在听,他们在说什么。Sberbank机器人实验室的Alexander Menshikov。使用ROS创建语音通信服务。
链接到演示幻灯片。
过去的ROS会议给与会者带来了很多关于在俄罗斯现代机器人中使用ROS的积极情绪和有趣的报告,我们希望在您的帮助下进一步发展俄罗斯ROS社区。 因此,我们邀请所有人在2019年11月30日在莫斯科举行的下一次ROS见面会上进行演讲。
forms.gle/G3ggYcvFLfuJw1ur6除了ROS Meetup,我们还在Sberbank机器人实验室为我们的项目进行ROS实习,有关更多详细信息,请参见
链接 。
如果您想进一步了解我们的工作或现代机器人技术的发展方向,我们建议您仔细阅读
全球机器人市场的年度
分析评论 。
在我们看来,聚集社区的最初经验是正确而积极的-我们将继续这样做。
下次ROS见面会定于2019年11月30日 !
您可以通过填写
申请表并等待确认您参与邮件来充当侦听者。
