
由瑞士和德国工程师组成的团队将传统的步行式挖掘机改造成可以挖起特定结构沟槽的自动机器人。 此外,挖沟的精度很高-3厘米。
根据该项目的开发人员,建设者需要这样的设备,因为他们可以加快在建筑工地挖沟的过程。 此外,机器人可以比人(当然,高级专家除外)更准确地挖沟。 但是存在一个问题-例如,难以显示机器人周围空间的地图。 另一个问题是机器人在快速变化的站点配置中确定自己的位置。

但是一切都顺利完成了,但是在科学家Marco Hutter的带领下,工程师们开发了一种自动挖掘机,该挖掘机可以高精度,高速度地挖掘各种构造的地沟。 创建机器人的基础是步行式挖掘机Menzi Muck M545。 机器人的开发者决定用安装了各种传感器和传感器的“智能”液压挖掘机系统来代替挖掘机液压系统。
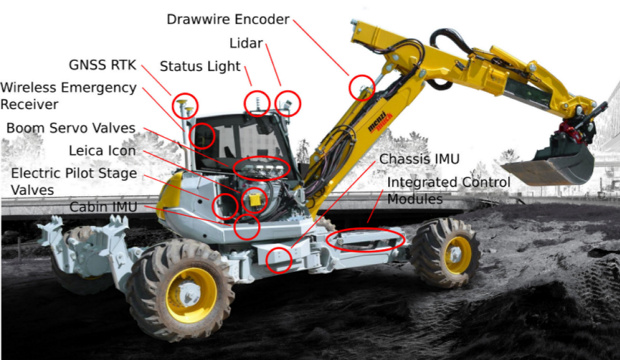
它们使系统能够“了解”并跟踪与地面交互的强度。 该挖掘机还配备了GPS传感器和RTK接收器,从而提高了确定系统位置的准确性,并增加了激光雷达和惯性装置。 由于精炼,挖掘机学会了精确地确定其位置,同时很好地“想象”出要挖的土壤。
对于机器人,创建了特殊的算法,从而可以创建环境模型,从而准确计算创建所需形状的沟槽所需的铲斗运动系统。 科学家面临的困难之一是,在铲斗离开沟渠后,土壤会崩溃。 即 一定数量的土壤返回到挖掘的地方。 算法提供了这样的机会,挖掘机“知道”该做什么。
然后,该机器人在其中一个建筑工地进行了测试,他需要挖出一个梯形轮廓的沟槽。 工作完成后,事实证明该系统的精度约为3厘米。 这远远高于其他开发人员获得的准确性。
将来,该挖掘机机器人将在其他条件下进行测试。 结果应该是一个无需外部监督和支持就能知道如何工作的机器人。 这样的机器人将有效地帮助建筑商,加快挖沟的过程。
这不是上述科学家团队的唯一项目。 她一直致力于在建筑工地上工作的挖掘机和其他系统的机器人化。 因此,类似的步行式挖掘机变成
了由远程操作员控制的单元 。