问候,亲爱的!
“水声水听器切割”©
从我们以前的文章来看,情况没有根本改变:我们仍然没有探索世界上大部分的海洋
池塘 ,这意味着我们需要增加压力。
因此,我会尽我所能。
今天,我将根据既定的不正确分类,详细讲解水下导航系统的不同类型,它们的种类,优缺点,通常情况下,在哪里跑步,按下什么东西以及在哪里转动。
Achtung:文章中可能会出现matan的痕迹!
如果您心灵的平静水域激发了这个信号,欢迎您来凯特!
对于
[1]声学定位系统,其类型始终表示为USBL,LBL,SBL。 “ BL”在此表示基准,即 基线。 我在这里提出并开始。
基线是多少?
基线由两个参考点形成,两个参考点的相对位置在给定的时间点是已知的。 第一张图片显示了这些参考点与所需参考点如何确定空间三角形的集合(
),其依据是基线(
)
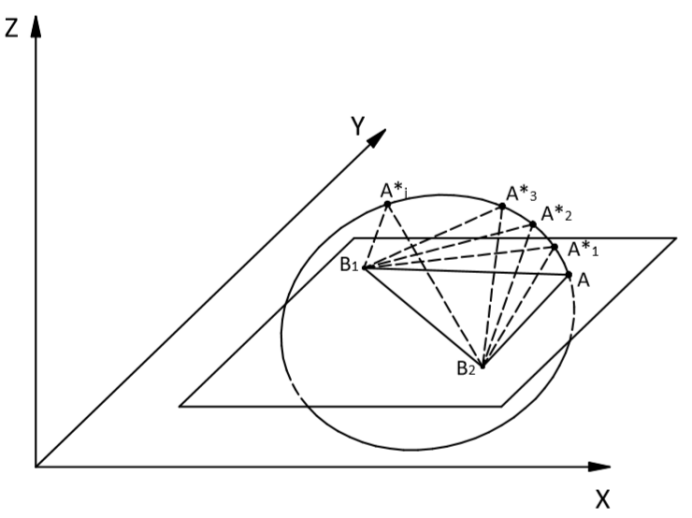 基线定义了圆上的所需点。
基线定义了圆上的所需点。三角形定义为:
- 或从两个参考点到所需参考点之间测量的基础和两个范围,在这种情况下,我们所说的是三边测量;
- 或在底部和两个角处,称为三角剖分。
抒情离题在写文章时,我一直在思考如何进入。
我记得我小时候看过一部电影,在世界末日后的世界里,人们猎杀了龙(引起天启),他们计算了它们在空中的位置,并将“信标”放在地面上,从那时起我就清楚地了解到要完整了解灯塔,需要三个。 “三角剖分”一词牢固地扎根于青少年的大脑。 我记得当时我的想法:成为这样的事情的开发者真是太酷了。
实际上,很好,我在这里!
定义三角形意味着确定所需点的坐标。
在确定位置时使用三角形起源于几个世纪的深度,最初的参考文献已经在
Thales [2]和
Euclid [3]的著作中。
一个基线给出了许多三角形的顶点位于一个圆上的三角形。 为了确定所需点在n维空间中的位置,需要n + 1个基线。 如果所需点的坐标之一是已知的(例如,通常从直接测量中
获知的深度(或
龙的飞行高度)),则所需基线的数量可以减少到n。
上面对基线的定义通常是指三角测量和三边测量的方法,但可以扩展到多边测量的方法[4]。
在这种情况下,到所需点的角度和范围是未知的,但是后者之间的差异是已知的(例如,所需对象发射信号的时刻是未知的,但是已知信号到达两个参考点的时刻并由同步时钟测量,即信号到达之间的延迟。参考点)。
信号到达时间乘以信号传播速度通常称为伪距。
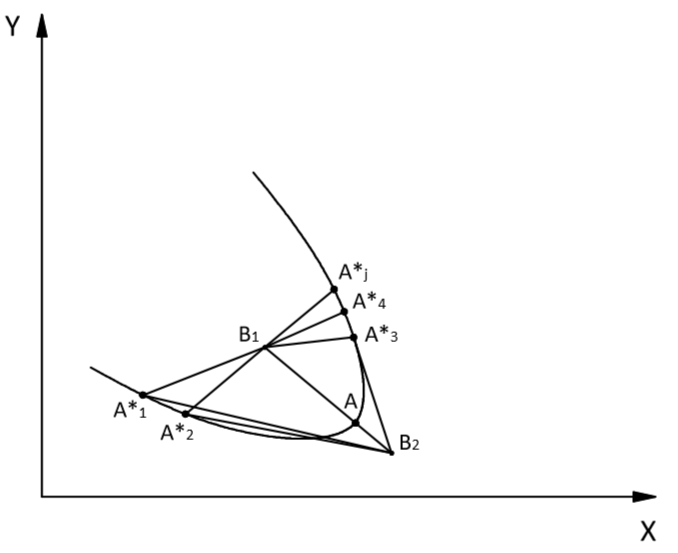 多边基线确定双曲线上的所需点
多边基线确定双曲线上的所需点从上图很容易看出,通过这种方式可以定义无限多个三角形(
),其表示所需点位置的顶点位于双曲线上。 在这种情况下,锚点将是双曲线的焦点。
在这里,与三角剖分的情况一样,所需点的位置完全由n维空间的n + 1个基线确定。
出口管制的坏话
事实是,根据坐标的位置,有两类系统:
- 实际上是导航(直接称为导航系统),其中坐标是在对象本身上生成的(例如在GPS中)。
- 跟踪(监视)系统,例如当对象上有某种信标并且我们正在承载它时。
因此,对于出口管制,这个词很不好,不适合使用,根据我们自己的经验已被悲惨地证实。 向官僚机构解释这“根本不是您想的”是非常困难的,从那时起,我们就将这种系统称为定位系统。
书呆子时尚他鉴于翻译的含糊之处,值得一提的是,定位系统不应与例如所谓的定位系统混淆。 船舶上的动态定位,动态定位系统(例如DP,动态定位)通常来自相邻区域,但含义有所不同-允许船舶将其地理位置和方向(航向)保持在一个位置的系统。
根据基线的相对大小及其不完整而普遍接受的分类
现在回到缩写词USBL,LBL和SBL的首字母。 它们确定基线的相对大小。
通常,相对于所定位物体的可能轨迹的最大尺寸来确定。
例如,如果说起来很简单,我们
强迫信服的潜水员将被告信标悬挂在自己身上,并想监视他的活动。 “已定位对象的可能轨迹的最大尺寸”是圆的直径,该圆的直径将适合其运动的整个轨迹。
书呆子时尚他对于所有严重程度,必须提到潜水员的轨迹是在与测量基准关联的坐标系中表示的。 即 如果我们跟随潜水员从支持船的橡皮船上跟着漂流,那么原则上我们可以漂流几公里(当然,实际上,潜水员无法做到这一点,而只能由遥控机器人完成)。 并且估计了相对于我们船的轨迹。
显然,分类属性是一般的,我完全同意。 但是,通常公认的分类就是这样构造的。 他们可以区分:
- USBL,超短基线-超短基线系统,基线的尺寸远小于所定位对象的轨迹,并且
- SBL,短基线-短基线系统,其基线尺寸与定位对象的轨迹相当,
- LBL,长基线-长基线系统,其中基线的尺寸大大超过所定位对象的轨迹的尺寸。
在短基础系统和长基础系统之间的级别选择上存在一定的歧义,并且通常作为短基础系统的标志之一,它们表示支撑元件彼此之间的刚性连接-例如,当它们固定在船上时。 长基座系统的支撑元件没有以任何方式在运动学上连接,即 它们在空间中的位置变化是不相关的。
现在,我们从优点和缺点的角度更详细地考虑所有这三种类型及其组合。
超短基础系统
顾名思义,超短距系统(UKB系统)中的基线比定位对象的轨迹小得多。
通常,在大多数现有的UHF系统(例如
[5] ,
[6]和
[7] )中,基线的大小是从单位到几十厘米。 它们大多数是测角系统-即 确定信标响应器或pinger信号到达角度的系统。
在布局方面,此类系统包括:
-基站-包含多元素接收天线的设备,该设备的单个元素形成一个相控天线阵列,在这种情况下,到达角由单个元素之间的输入信号的相位差或一组基准(也由成对的单个元素形成)确定。在这种情况下,到达角由信号到达元件的不同延迟确定。
为了避免摆弄图片的版权,我将以Zima-Base作为基站的示例:
在桌子上:

在工作时刻:

-信标响应者响应来自基站的请求,与响应者信标不同,信标响应者又可以确定信号在信标和基站(倾斜范围)或pingers之间的传播时间,以固定间隔发射信号。 Pinger可以与基站预先同步,从而可以单向测量传播时间。
作为示例,我再次给出Zima系统的信标响应器:
带有电池盒的自治系统:

板载TNLA:

也有一些系统,其中转发器电耦合到基站,询问信号作为电门脉冲提供。
因此,UKB系统的类别由相当广泛的各种特定执行方式表示,并且通常将系统排名为UKB不能提供有关其特定操作方法的足够信息。
下图说明了UKB系统的一般操作原理。
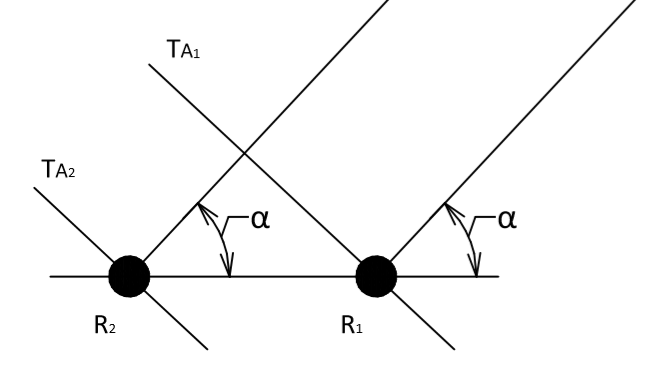 演示确定信号到达角度的系统的工作原理
演示确定信号到达角度的系统的工作原理上图显示了一对接收平坦信号前端的天线阵列换能器。 从已知距离
换能器之间和测量的延迟之间
由角度决定
信号到达。
UKB系统的明显优势包括所需的设备组成少和系统的快速部署。
在通常情况下,响应器或pinger可以
用胶带包裹,只需将其固定在定位的物体上,就可以提高整个系统的通用性。
在某些实际情况下,使用UKB系统是无可争议的。 例如,当搜索
意外沉没的东西
而沉没,并且由于搜索区域的广阔而无法预先建立长的底座时,或者当位置的深度不允许您设置浮动的长底座时,并且在时间范围和/或天气方面,底部底座的安装不合理条件。
但是,UKB系统具有某些严重的缺点。 例如,要确定绝对坐标中已定位对象的位置,必须在空间中完全定义基站本身:不仅需要知道其地理位置,还需要知道接收器阵列在空间中的方向:方位角,侧倾角和纵倾角。
也就是说,从结构的角度来看,UHF系统不仅应包括本身在结构上非常复杂的多元素天线阵列,而且还应包括可以确定其在空间中位置的设备-沿两个水平轴的倾斜传感器和一个传感器航向-磁性或GNSS指南针。 如果将测向天线安装在水下物体上,则将关闭使用GNSS指南针的可能性。
而且,由于 通过信号到达的两个角度(水平和垂直)或响应器或pinger信号中传输的水平角度和深度(时尚且渐进)来估计所需对象的位置,很明显最终角度精度
系统将提供一系列的增加
下图显示了定位对象的确定位置的误差,该误差随与角度误差的切线成正比的距离而增大:
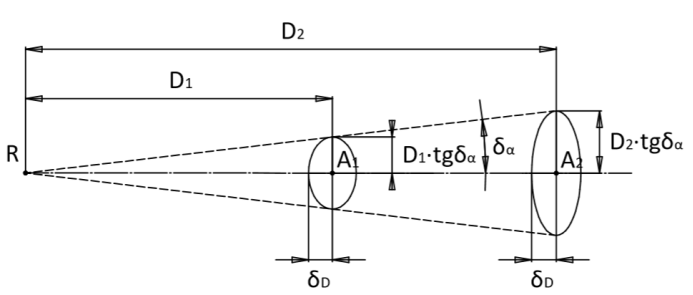 UKB系统角度精度对确定物体位置误差的影响
UKB系统角度精度对确定物体位置误差的影响上图显示了确定的信号源位置的扩展范围。 椭圆的半轴之一
由距离测量中的误差确定,另一个
其中D是到光源的距离(倾斜范围)。
此外,在模棱两可且无法保证直接光束识别的情况下(光束-读取信号的前端,直接呼叫直接来自光源的光束,没有任何反射),整个UHF系统会受到多径传播的强烈影响,特别是在海岸线或水下景观的任何元素都有反射。
换句话说,在存在来自其他方向(相反方向)的强大反射信号时,UHF系统无法幸免于接收直接信号(因为一般来说,此问题无法解决-反射信号的总和比直接信号更强大,“更大声”)有时在实践中),从而导致解决导航问题的结果完全不正确。
较新的系统直接测量应答器或pinger的深度,而较旧的系统以两个角度确定位置。 事实是,垂直角的确定性最低,因为 声音作为一个整体可以经历多次底表面反射,并且其定义仅在最小距离处才有意义。 如下图所示,通道的垂直部分显示在上方图像中,可以看出,从反射信号之一确定垂直角时,误差可能完全不可接受。 同时,在该图的下部示出了顶视图,可以看到所有反射信号都来自相同的水平方向。
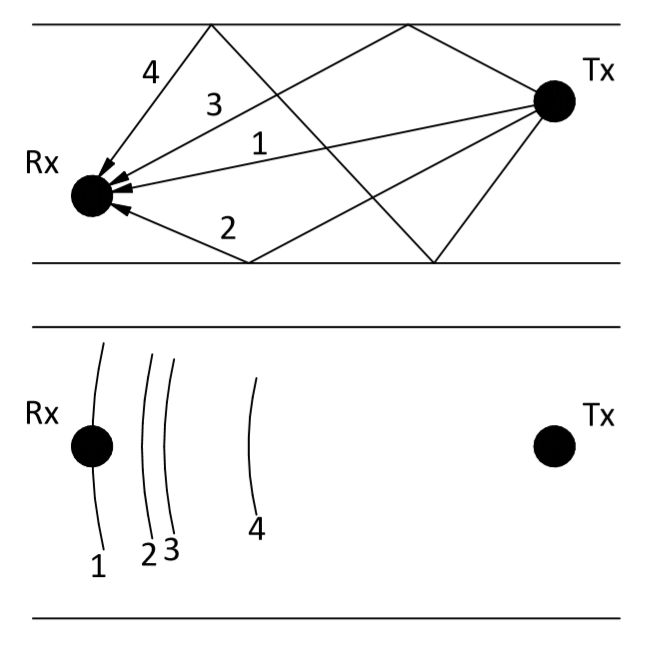 UKB系统中确定水平和垂直角度的精度不同
UKB系统中确定水平和垂直角度的精度不同总结对UCB系统的讨论,可以说它们的应用领域是难以,不合理或不可能使用其他类型的导航系统和定位系统的地方。
现代UKB系统的制造商报告其产品的角精度高达0.03°(1σ)
[8] 。
它们的优势:部署速度快且用途广泛。
从与用户沟通的经验来看,我可以说周围的每个人仅仅因为部署的速度而只想要UKB。 不管我解释多少,无论我写多少,每个人都点头,但他们仍然想使用UCB。 俗话说:“别忘了受苦”。
某些经验不足的人通常将缩写USBL用作任何水下定位系统的名称。
书呆子时尚他更具好奇心的是什么水声被称为声纳。 我们是有文化的人,我们记得,声纳就像雷达,只带有声音,也就是声纳,但这是一个完全不同的故事。
短基础系统
在大多数情况下,短基系统位于专用船的船体上。 即,基线的尺寸与容器的尺寸相当。
当前,UHF系统的准确性很高,使用便利性似乎比KB更高,这导致KB系统无法广泛使用,并且KB系统解决的任务现在仅包括那些具有特定条件且不允许使用的任务。应用UKB系统。
但是,在过去,例如,设计局曾被用来护卫Triest-1深潜艇到美国海军Thresher潜水艇的死亡地点。 SHARPS SBL KB系统在伍兹霍夫海洋研究所使用,将深海飞行器JSON连同其下降架MEDEA一起使用,据报道达到了0.09 m的定位精度[9]。
在现代KB系统中
,可以注意到
这一点[10] ,制造商将其定位为“ Underwater GPS”(水下GPS),并以设计师的身份分发。
为了吸引眼球并感受到部署的所有魅力和“简单性”,我将提供一些来自我们最近对原型设计局进行的停车自动水下航行器测试的图片:

铝制框架是短底座。 您可以想象启动此设计的便利。

公平地说,值得一提的是,在整个工作意识形态中,它只能下降一次。 在测试过程中,我们也不得不提高它-配置文件要花钱,并且水听器不在路上。
在总结知识库系统时,我们注意到:
KB系统的优点包括:
- 部署速度和机动性(系统通常安装在船上);
- 平均而言,与UKB系统相比,其准确性更高(但是,必须牢记,某些高级UKB,例如[8] ,通常比某些简单的KB(例如已经提到的Waterlink GPS [10] )具有更高的定位精度) 。
通过缺点,KB可能包含UHF系统固有的相同缺点,即:
- 确定测量基准(基线)的方向的必要性-除了与绝对地理位置相关,还要在路线的各个角落进行滚动和修剪;
- 鉴于其运动学联系,例如由于俯仰,确定基本元素到达时间时的误差相关性
- 并且,由于设计局通常可以用作测角系统,因此当从基座上移动定位的物体时,它也存在精度降低的问题。
- ( «») .
这些是我最喜欢的系统类型。 DB-表示长基础,而不是您所想的。基线的尺寸远大于所定位对象的轨迹,并且基础元素没有在运动学上相互连接。通常,当其元素位于底部时,底部可以是底部,例如[11]和[12],或者当支撑元素是装有GNSS接收器的浮标时,底部可以是浮动的,这里我们以系统为例[13]。 ]和[14],GNSS GPS系统[15],GLONASS [16],伽利略[17],北斗[18]及其某些前身-DECA [19],Chaika [20]和LORAN [21] 系统。由于尺寸很重要,并且避免了UCB和KB系统的许多缺点,例如,从底座移开时降低了精度,因此DB系统在确定已定位物体的位置方面提供了最大的准确性-DB在导航底座内部和退出时平均提供相同的精度从中定位的对象可以继续充当测角系统。DB系统不太容易受到与多径传播相关的错误的影响,如下所示-如果无法正确确定直射光束,则行进时间差可能很小(米为单位),这可以通过存在过多参考点来轻松补偿,仅在最坏的情况下在确定光束路径中差阶的位置时出现了错误,而UCB可以估计该光束的到达角度,这可能几乎是任何东西,从而导致到完全不能接受的误差。在数据库系统的缺点中,主要的是安装的复杂性,这对于底层用户尤其如此-首先,底层元素应提供足够的自治权以最大化服务时间间隔,其次,因为通常,这样的系统在相当大的深度(500米及以上)上运行,然后对常压建筑物提出了附加要求,第三,还有一个额外的问题,即在完成工作后拆除底座。最后,在安装底座之后,必须以大地测量精度确定其元素的位置,例如,使用虚拟DB方法或使用大量测量值的UCB系统。所有这些操作都需要专门的昂贵设备以及许多高素质专家的劳动。浮动基础的情况要简单得多。几乎可以在任何船上安装水声接收,发射或接收和发射的浮标(我们从划艇充气船上设置我们自己在15分钟之内),鉴于安装和拆卸的简便性,支撑元件几乎没有自主权,它们的船体通常可以做成大气性能。值得一提的是,在深处作业时,浮动基座的使用非常复杂,其原因有两个:第一个是安装锚固件的困难,原则上是通过电动浮动基座解决的,这确保了地理位置的自动保存,第二个则更为严重,而且通常排除了在较大深度下工作时使用浮动基座的情况-跳跃层的信号(表示跳跃的层在声速中存在全反射)的存在。密度,从中可以完全反射出声音)。此处唯一的解决方案是删除跳跃层下的水声天线,这又会带来更多问题-水声天线的地形定位复杂,电缆的重量,非常复杂的设计,在这里我们又重新开始了。传统上,作为一个视觉示例,我带来了我们的RedWAVE DB系统,浮标(潜水员是唯一的,不包括在内): 导航接收器:
导航接收器:
虚拟长基地系统
基于所谓的系统虚拟长基线[22] [23] [24](VDB,英语VLBL-虚拟长基线)由于设计和布局的原因而值得作为一个单独的组进行分配。VDB系统的本质是在空间的不同点上测量到应答器的倾斜范围或pinger信号的到达时间,如果满足一个条件,则此方法是正确的:定位对象保持固定位置,而移动参考点通过确定或测量距离来构成导航基础的要素给被告或确定从不同位置发出的pinger信号的到达时间。此类导航系统具有所有明显的局限性,具有最广阔的前景:首先,它不需要任何复杂的设备,例如在UHF系统中-名义上仅用两个收发器或一个发射器和一个接收器即可解决任务,而这并不需要或以一种特殊的方式在太空中定向。在使用探查器的情况下,可以使用大量的自主地面车辆来组织协作搜索探查器。在理论上不受限制的区域中搜索下沉的物体(例如坠毁的飞机或船只)时,尤其如此。同样,用于初始确定底部长碱基的元素位置的方法之一是WDB方法。举例来说,我将在两个uWAVE微型调制解调器上提供一个虚拟的长期演示项目(甚至两个!)。我们以前的一篇文章中介绍了第一稿。在那里,使用STM32上的板将调制解调器,GNSS模块和无线电模块组合在一起。在该项目的新版本中,代码被重写为Arduino UNO,导航问题的解决方案在一个开源应用程序中执行。组合系统
组合系统通常包含两类或更多类系统的元素。因此,例如,在综述[1]中描述了一些技术解决方案,将可部署的长底座和安装在船上的短底座组合在一起,其主要任务是放置长底座的元素。显然,也可以借助UKB系统对长底座的元素进行定位。通常,可以说,奇怪的是,要解决的问题决定了特定合成方案的选择。在绝大多数情况下,合成不同类别系统的目标是对长基础支撑点进行初始定位。异国情调
在这里,我们仅简要地间接涉及本文主题中的某些类的系统。其中,基于航位推算的声学系统是建立在所谓的多普勒滞后装置通过在至少三束狭窄的射线中发出声信号并随后接收信号来测量定位物体相对于底部的速度。物体相对于底部的运动导致在接收级检测到的发射信号出现多普勒频移。在沿三个轴的速度投影中重新计算了多普勒频移。结合航向传感器(罗盘)的读数和加速度计的读数,就形成了针对物体位置的一系列决策。此序列的启动需要初始定位。考虑到相对保密和自治,这种类型的系统主要在军事上应用。它具有死锁系统的所有缺点,这些缺点与错误的快速累积有关。即精度会随着时间而降低。仍然有异国情调和相当异国情调。对于第一个,我将参考基于底部图像分析的系统(CARL!),第二个-通过磁场波动导航(CARL !!!)。)关于他们两个人的实际适用性,正如他们所说,我要“表示严重关切”。在干渣中
因此,在现有分类中,声纳导航系统主要分为三类:- 超短基,其中通过使用紧密间隔的声音接收器测量信号到达或延迟的相对相位来确定响应信标或pinger的位置。这样的系统需要初步校准,一组附加传感器,对特定的多径模式敏感,但具有最大的移动性。作者[1]报告了UKB系统的精度约为倾斜范围的0.5-0.2%。
- , ( ) , ; , -, , [1] , 0.5% ;
- 长基线,其中对象的位置由三个或更多倾斜范围(或差异)确定,并测量到三个或更多相距较远的参考点。这种类型的系统很难使用和维护,可以以两种截然不同的版本来实现-底部和浮动基座,并且据作者[1]称,与其他类型的系统相比,其准确性最高-约为位置深度的0.1%。在同一地点,在我已经抹去的Vickery评论中,报告了在不同频率范围内运行的系统所定位对象的定位误差的绝对值-低频系统为2-3米(最高15 kHz),中频系统为1米(19-36) kHz),对于在50至110 kHz频率下运行的系统,最长可达5 cm。
聚苯乙烯
非常感谢您的关注,我们将很高兴听到建设性的批评并回答问题。
如果本文会引起读者的兴趣,那么我接下来将计划讨论水下导航系统的正确分类。
如果一切顺利,那么在另一篇文章中,我将通过代码示例分析几种用于导航系统的算法。