我们喜欢机器人。 我们是技术大学的学生,设计师,电子工程师,程序员,我们都热爱创造机器人。 两年前,我们的setUP团队在Sberbank机器人实验室的基础上出现,并同时参加了为年轻的机器人迷创建的移动自主机器人Eurobot Open的竞赛。 此刻,球队打了2个赛季,两次成为副冠军,进入国际舞台。 我们已经好几天没睡觉了,对我们的机器人进行了编程,焊接,组装和拆卸,在比赛开始前一个小时发现了严重的问题,然后又开始了。 我们还获得了一次难忘的经历,并获得了许多有趣的解决方案,我们希望在一系列文章中讨论这些问题(包含许多GIF,精心设计,流量)。

欧洲机器人公开赛是国际自治机器人竞赛。 任务,战场和游戏元素每年都会变化,但本质保持不变-团队必须创建两个自主机器人,这些机器人将与小对手在有限的区域内以有限的资源竞争对手100秒钟。 这个简短的建议隐藏了团队必须解决的大量任务,因为机器人必须快速,可操纵,能够独立执行任务并且不能面对敌人。 而且每年都有必要开发新的机器人。 然而,过去几年的经验和成就可以带来巨大的优势。 每年,我们都需要本地化系统,对敌人运动的预测并避免发生碰撞,路线规划器,灵活的行为管理系统,我们自己的电子设备和力学。 是的,对于很多这样的应用程序来说,都有标准的算法和库,但是由于功能的特殊性和资源消耗的要求,其中的大多数算法仍必须进行大量修改或从头开始编写。
 我们的团队在莫斯科举行的俄罗斯决赛中。
我们的团队在莫斯科举行的俄罗斯决赛中。关于我们参与2019年的精彩视频:
2019年的主要游戏主题是核能。 但这并不意味着要求团队制造一个由核引擎驱动的机器人。 只是不同的游戏任务和元素被赋予了主题名称。 操纵的唯一游戏对象是冰球-电子。 它们具有不同的重量,不同的颜色,以及一种具有不同大小的“金”。 有必要收集位于田间不同位置,不同位置,不同高度的最大数量的垫圈,然后根据其是哪种化学元素将它们分类为田间区域。
 这就是2019年的比赛环境。
这就是2019年的比赛环境。今年,我们的机器人的代号为Chip和Dale。 怎么了 我认为照片中的答案很清楚:
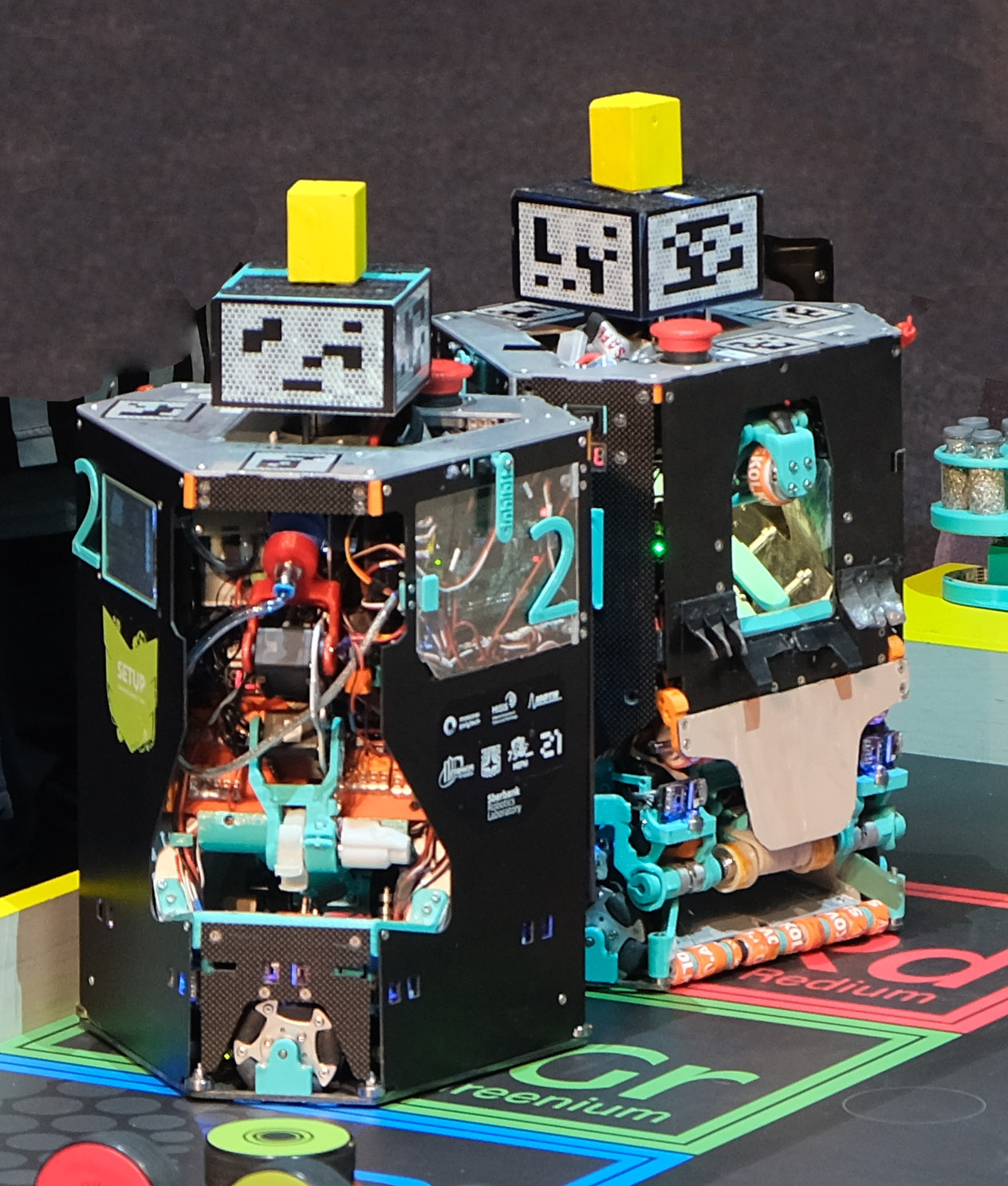
上一季,让我们讨论一下机器人中的基本技术解决方案。 今年,我们尽可能地统一了所有东西,我们有两个双机器人。 下图为我们的机器人的结构图。
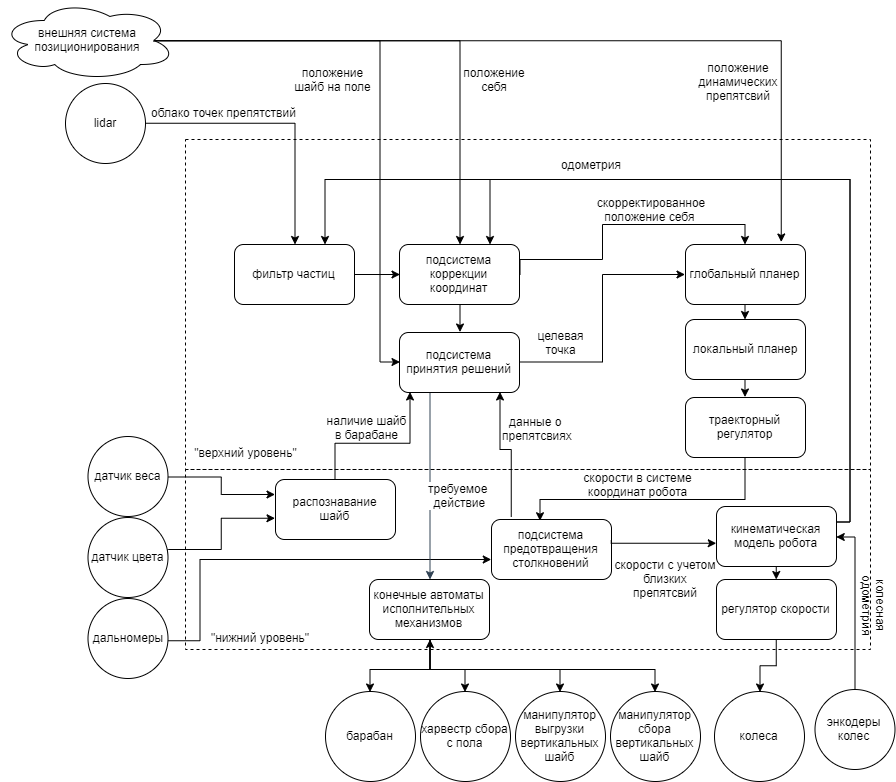
最高级别由单板测试的Odroid xu4以及ubuntu 16.04和ROS Kinetic代表。 所有的“困难”任务都在执行。
在较低级别,STM32F407VGTX-DISC1处于工作状态,卡在自行设计的屏蔽层中,使您可以方便地连接十几个电机,伺服和花环传感器。 顺便说一句,他们总是获得可观的收益。 我们的每个机器人都包含激光雷达,7个dc / bldc电动机,9个伺服器和大约25种不同的传感器(颜色,重量,距离,电流)。 所有这一切,再加上另外6种体积机制,都放置在周长为850,高度为350 mm的紧凑型机器人中。 FreeRTOS服务于需要实时执行,处理所有传感器和状态机的任务,它正在STM上旋转。
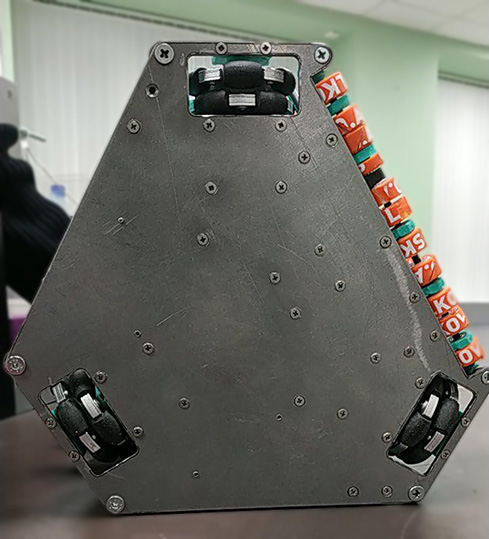 机器人的omnicholes的视图。
机器人的omnicholes的视图。一个有趣的功能是使用全轮平台作为驱动器,它使我们可以在任何方向和任一侧进行驱动,而无需执行不必要的转弯,从而极大地提高了机器人的可操纵性。
因此,例如,在法国举行的比赛的下一个视频中,可以看出,尽管我们被封锁(由于对手的严重违反规则),但机器人是如何摆脱珠宝陷阱的。
但是,由于全方位的原因,车轮测距的准确性非常差:车轮不是完美的圆形,滚子游动且接触点很小。 要解决此问题,您可以定期撞墙,重置错误或应用外部调整系统。 为此,激光雷达通常被放置在机器人上。 几年前出现了另一种解决方案:在现场添加了一个可以放置相机的地方。 去年,我们仅通过外部摄像机旅行,并检测了应用于机器人的aruco标记,但是与此同时,我们同时使用机器人上的激光雷达和外部摄像机进行了本地化(本地化和导航将很快成为另一篇有趣的文章)。 我们没有时间测试激光雷达,所以我们骑着相机走来走去,将激光雷达用作rucomarkers的支架。 系统的优势-我们知道所有机器人在现场的位置。 缺点-对外部光线的高灵敏度和校准精度,不幸的是,这使我们多次失败。 但总的来说,里程表和粗略探测器的结合使我们能够在2x3米的视场上以几毫米的精度定位自己。
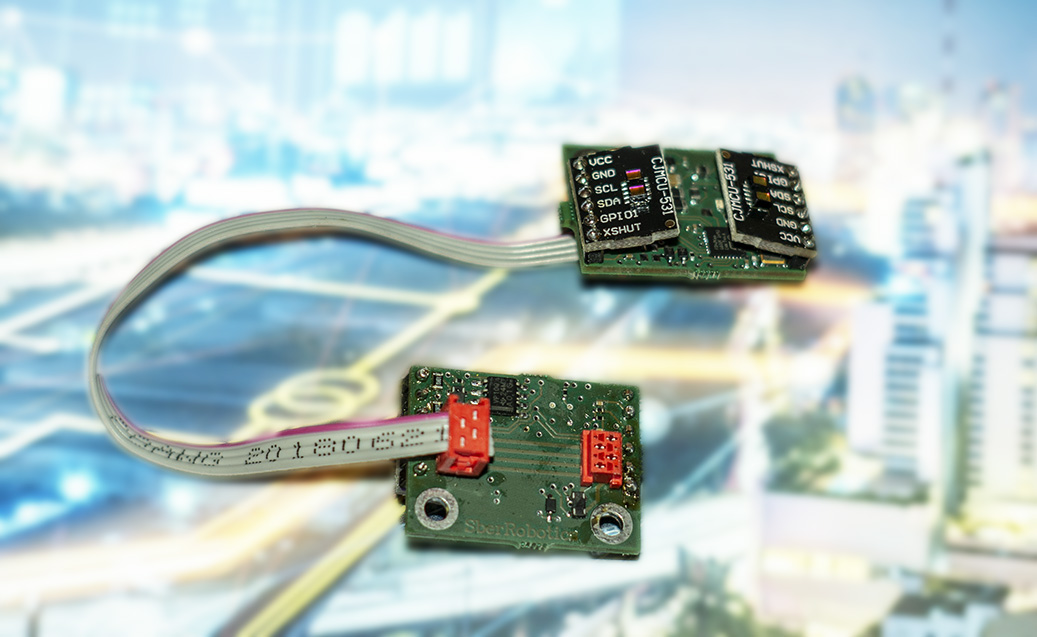 我们开发的测距板。
我们开发的测距板。该规则禁止与其他机器人发生碰撞(为此,它们也可能被取消资格),因此对于机器人而言,及时注意其路径上的障碍非常重要。 通常,为了监视近区,安装了对表面极为敏感的普通阈值红外测距仪或Sharp GP2Y0A21YK,例如,它们可以在半米远的抛光铝上工作,但仍然看不到焦点的碳。 超声波测距仪也经常使用,但是它们对反射面的角度敏感,并且害怕相互干扰。 近来,ToF测距仪,例如VL5310x或VL53l1x,正在迅速普及。 曾经尝试过这些传感器,很难拒绝它们-它们对障碍物的依赖性较弱,精度高,结构紧凑,价格低廉。 但是,去年我们尝试使用VL53l0x,并且出现了许多细微差别。 在i2c上的一堆电机和伺服器中放上十几个测距仪时,会发生什么情况? 另外,传感器不能设置一个恒定的地址,而且,幻象中的樱桃挂起了。 因此,今年我们切换到rs485,大大简化了测距仪的使用。 在机器人的照片中,蓝色的光就是它们。
在这里,我们以各种可能的方式阻止机器人直接在两点之间移动,结果它固执地比我们聪明:
使用外部定位系统,成熟的滑翔机以及出色的防撞区附近功能,您可以以1m \ s的速度执行这些操作。 在接下来的文章中,我们将尝试从决策中最大程度地讲出最有趣的事情(并打基础),但是今天我们要谈谈今年力学的特点。
Eurobot的机械设计以其特殊性而著称。 首先,由于这是一场竞赛,因此一切都应尽快运行,并且百分百可靠。 其次,设置任务以使您想要赚取的积分越多,机械师设计起来就越困难。 而且,机制越复杂,其失效的可能性就越大,根据墨菲定律,这种失效的可能性将在最不适当的时刻发生。
乍一看任务似乎很简单,但事实并非如此:操纵对象(获取,重新定向,设置)的任务仍然极难解决。 与通常固定放置,移动所有坐标并在理想条件下工作的工业机械手不同,一切都更酷:我将机器人放在场地上,拉开钥匙,直到比赛结束机器人才能工作。 实际上不存在某种坐标调整和附加调试的可能性。 必须考虑到可能存在的严重定位错误或现场制造中的不准确之处(例如,机器人认为其正对着拟取的圆盘,但实际上距所需坐标的偏移量为15 mm),因此要使操纵器的把手整齐,逐点移动是行不通的:在实际竞争中,您将遇到严重的问题。
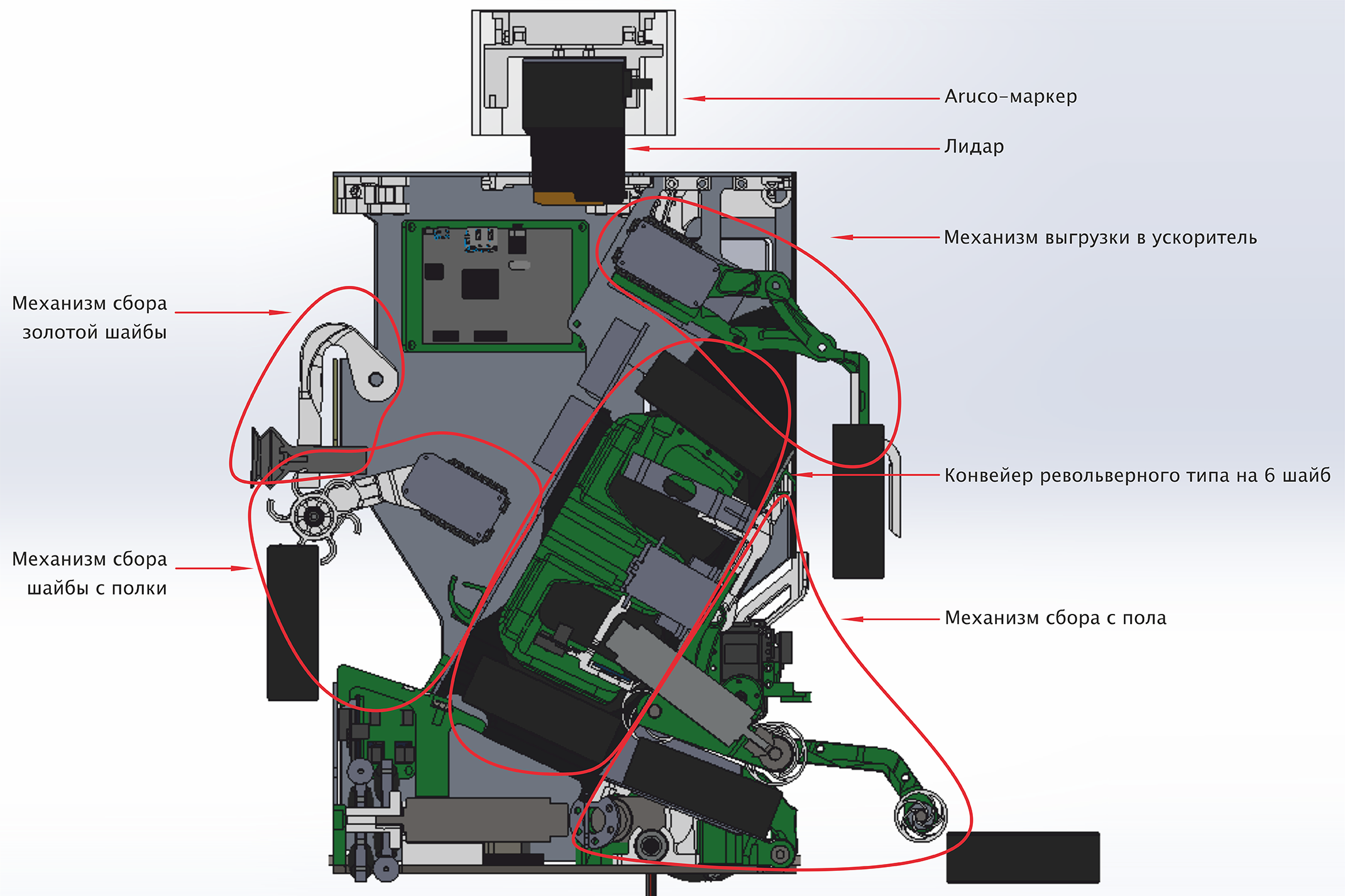 机器人中的机构安排。
机器人中的机构安排。我们设法构造了两个相同的机器人,每个机器人都解决了比赛框架内的所有可能任务。 机器人装有一个带6个垫圈的旋转式输送机,我们随时可以卸下其中的一个。 在现场,垫圈处于两个位置:躺在地板上和站在特殊的架子上。 为每个选项设计了自己的收集机制。 使用特殊的翻板辊将架子上的垫圈组装在一起,该垫圈将垫圈推到坡道上,垫圈沿着坡道驶入洗衣机的左下单元,然后检测到其颜色,旋转左轮手枪,然后将机器人拉到下一个洗衣机。
机械手的支撑架由铝片和204个印刷部件制成,其中6个单元的Dynamixel AX-12A,1个Dynamixel MX-64和2个9克,3个maxonmotor 16mm和1个maxonmotor 22mm负责该机制。 底盘是三个maxonmotor 22mm和
60mm的全孔 。 所有这些都经过106轴承的调味。
为什么要使用动力混合器而不是标准伺服器? 它们具有许多保护功能,数字控制和许多设置,方便的串行连接以及总体上良好的质量。 我们的经验还表明,每个季节的廉价伺服器会在一圈内变化数次,而昂贵的伺服器成本几乎相同。

由于地板上的大多数垫圈不是处于特定坐标,而是随机放置在特定区域内,因此很难使用机械手,因此开发了一种特殊的吸收垫圈的装置。
垫圈在两个区域中卸载:在秤上,垫圈可以落在任何位置;在加速器区域中,垫圈被放置在垂直位置。 在这里,机器人理想地将所有东西都卸载到家中的加速器中(占案例的90%):
但是,在决定性的比赛中,不幸的是,这只解决了一次。
当卸下加速器时,可以立即将两个垫圈都甩在一个倾斜的表面上,然后先将它们放到水平表面上,然后再将它们推到一个倾斜的表面上。 第二个选项可让您再投两个进球并得分。 因此,选择了该选项,后来发现这是一个严重错误。 开车到墙上,扔掉冰球,用滚子丢弃,再重复N次是非常困难的。 垫圈可能会歪斜地站立,而不是加速,坠落到墙壁上,最重要的是,它会阻挡后续垫圈的通过。
从比赛的经验,尤其是其他团队的建设性决定中可以看出,力学上的决定越简单越好。 当前的解决方案需要大量复杂机制的协调和调试工作,其中任何一种机制的故障都会导致整个系统出现故障,并且
从可靠性理论中知道
,这并不是很酷。 而且,机械师需要定期进行调整和小修,这停止了对机器人上的软件进行调试的过程。 最好在单个连杆上制造一个带有一个吸盘的机器人,该机器人将垫圈叠放在一起,但可以按预期完成百分之一百的情况。 另一方面,参加比赛不仅可以视为得分比赛,而且可以作为实施最有趣,最酷的工程解决方案的好方法。
总的来说,尽管在法国表现不佳,但我们对结果感到满意。 我们吸取了很多教训:任务的就绪状态不是二进制参数,开发速度通常与所涉及的人数成反比,简单而专门的小型任务机制和模块要比复杂的理论上更好,并且在理论上还可以拥有漂亮的想法。 并为新赛季做好准备。
视频链接和更深入的评论:
Eurobot官方规则页面 。
团队指导者的详细审查 。
Eurobot并不是受训者只能在Sberbank机器人实验室做的唯一事情;还有其他实习,例如,在iCub平台上的对象的智能操纵,移动机器人,拟人机器人等方面。 您可以进行联合研究,写文凭,硕士学位(如果这与实验室的主题相交)。 将您的简历和申请表免费发送至robotics@sberbank.ru
我们的电报:
t.me/SetUpSber