由于受到航天器和著名品牌赤道仪价格的影响,谷歌有几种选择。 每个都有自己的+和-,但是所有人都由一件事-谷仓的门结合在一起。 就像我们这个星球的讲英语的公民所说的那样-谷仓门。
最新的文章和最详细的文章出现
在Habré上 。 我从所有人那里汲取了一点心血,然后决定建立类似的东西。
我喜欢转速可调的想法。 但是我认为细针和设备尺寸不适合我。
花了将近6个月的时间。 多亏了速卖通,一点也不表达。
因此,我首先在SOLIDWORKS中绘制所需的内容。

他画了从木板到坚果的所有东西。
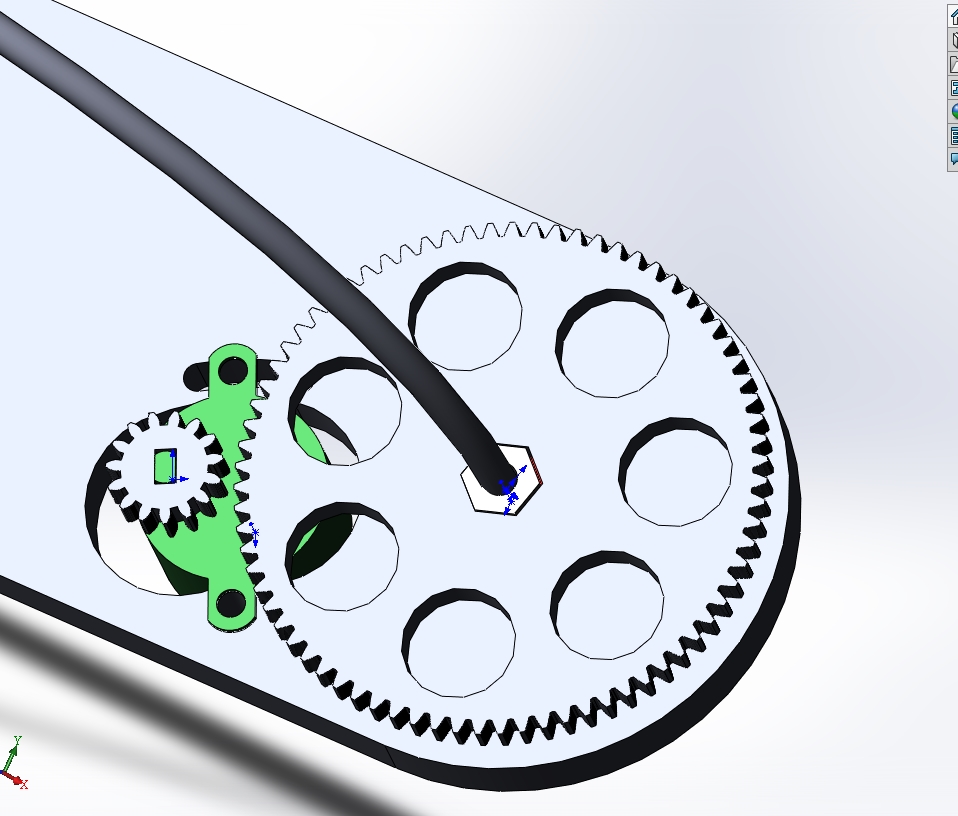
由于我的直觉要求“更多,更高,更强”,所以我决定将齿轮比设为1:5。
齿轮的第一个版本:高度6mm,螺母m5。

开始了初步组装后,结果发现发动机上的齿轮比螺柱上的齿轮高。 怎么办 绘制并再次打印。 3D打印机的好处就在眼前。
更糟的是。
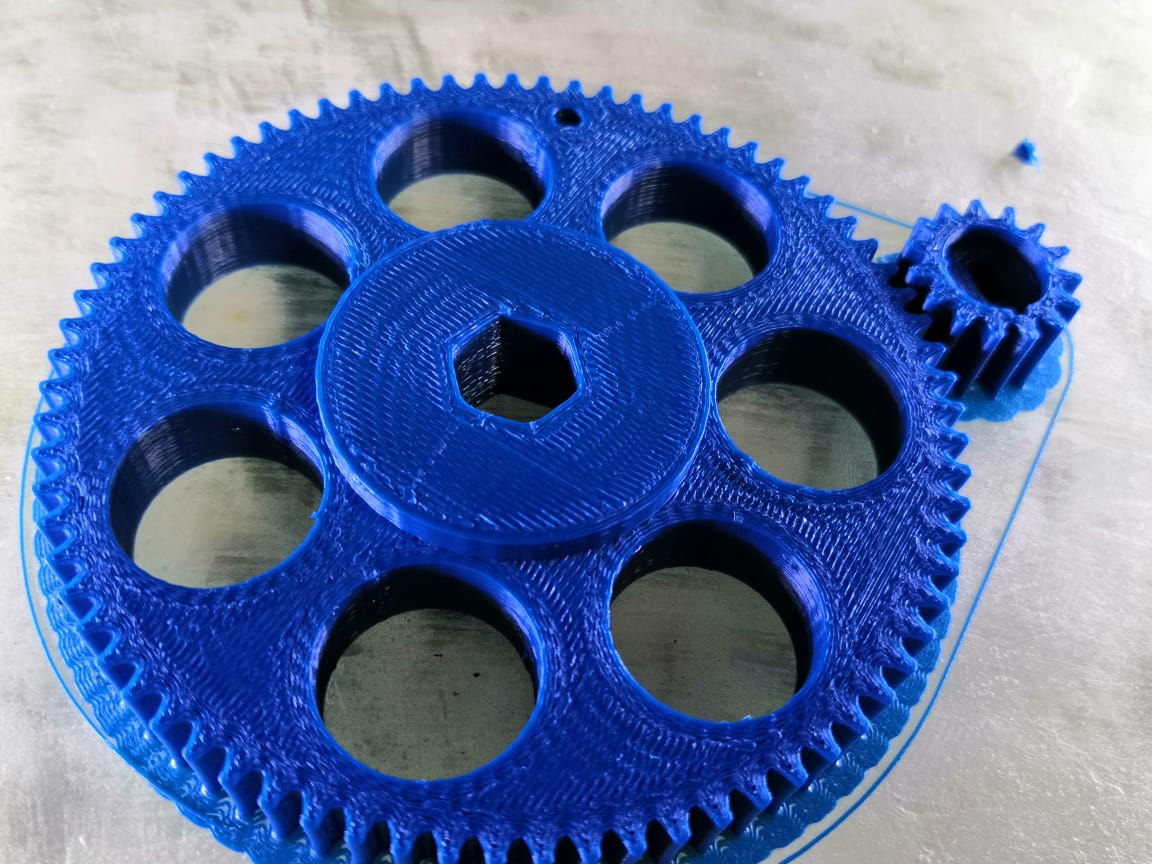
他增加了一个支撑部件以减少摩擦并提升齿轮,并且将其厚度增加到总计12毫米和10毫米-齿轮。
他释放了“电机”齿轮,以进行深度着陆。 并且在每个齿轮上都标记了一个2mm孔的形式,用于旋转控制。

选择“设备”的循环时要考虑到宽度和最小游隙。 100擦2个

为了减少打开时的错误,我重新设计了基座和倒数部分。 在循环下取样。 很遗憾,没有CNC路由器。 我要点菜 尺寸240x80mm。
我们的铣床是由10毫米胶合板制成的,价格为300卢布。 以及胶合板。


最重要的是,6毫米螺柱值得怀疑。 温和地说,她的准确性不是很高。 螺母在某个地方飞了,但是钥匙无法转动。
在撰写本文时,所有内容都处于分解状态。 明天将准备一个新的基金会。
由于astrotracker的“创始人”详细地编写了所有内容,因此最困难的是编程。 一切都需要20分钟。 没错,从一开始我就记得五年级的数学,九年级的天文学,物理学和Excel。 这一切花了整整一天的时间。 既然如此,我不希望引擎以正确的速度旋转。 另外,由于双头螺栓和跟踪器的大小不同,因此我将“默认速度”略微更改为297。 但实际上,组装将再次进行调整。 并更改了2个按钮的目的。 现在它们不是每个增加10个单位,而是每个增加100个,我决定,我可以将1个恒星速度调整为0.10个单位,但是我想使时移更快。 并且,通过减少击键操作就可以将跟踪器返回到其原始状态。 但是我认为这种做法将使一切就绪。
我保证稍后将进行所有修改后的组装,并发布第一个结果。
有一个想法是用铝制的底座制作一个自制的环,然后在环中安装一个激光指示器,从而固定中心。 但是这种想法被驱逐了,并说了“尝试一下,那么您将走得更远”。
晴空万里。