问候,亲爱的!
“如果响应朋友或敌人的请求答案不正确,则第二个请求将已经以第533个频率出现 ”(C)
“所有这些都以某种方式过去了。 或通过你。 对我来说,它就像压路机。 只剩一根骨头了。 “(C)A.和B. Strugatsky,“注定的城市”
您是否曾经想过如何在水下,比如说拳击或走路?
在我们真正有时间享受物联网的所有魅力之前,
考虑科学资助申请时 ,
它已经成为停用词,因为科学而不是诸如此类的出版物开始出现在如何承受声纳定位系统的网络攻击上,而且(天哪! )到自主传感器的海底网络!
只是技术悬念的几段内容,我保证会解释所有内容。

很好,您正坐在显示器的另一侧,正在阅读其他分析数据。 当我回答自己做的问题时,我仍然感到羞耻。 您知道,许多人甚至都不怀疑在水下传输数据是某种问题。 或者,说GPS在水下不起作用。
到底是怎么回事?
让我们立即说明条件。 有东西要依靠。 现在,我将为您提供一些估算“通过眼睛”的技巧。
声纳通信可使用非常
窄的频带 ,大致范围从单位到数十千赫兹。 不同频率的声音会不均匀地淡出。
如果我们采取“平均”海,衰减系数为:
- 频率为1 kHz的声音约为0.1 dB / km
- 适用于频率为10 kHz-1 dB / km的声音
- 对于频率为100 kHz的声音-无情的10 dB / km。
这是什么意思? 这意味着,如果您使用宽带信号,则
频谱的不同部分将以非常不同的方式传播 。
我同意,这些分贝也总是使我感到困惑,并且“吓坏了赫兹的根源”。
如果一切都大大简化,则平均通讯范围:
- 在1 kHz左右的频率下,它可以达到几十公里(有一定百分比的运气-数百)
- 频率在10 kHz-10公里
- 频率在几百千赫兹-几百米之间,如果至少没有一个成功的话,上帝会禁止的。
估算信号频率以达到所需范围的非常粗略的公式如下:
$$显示$$ kHz = 40 / km ^ {2/3} $$显示$$
或者,如果您需要找出理论上给定频率的信号可以提供的范围,则:
$$显示$$ km =(40 / kHz)^ {3/2} $$显示$$
在1至100 kHz的范围内,该公式或多或少是正确的。
在20 kHz量级的频率下,可望达到2-3 km的通信范围,并且在100 kHz-300米范围内的频率下。 这样的事情。
来自任何大型金属零件的噪声通常是低频的,并传播到很远的距离。
如果我们要传输数字数据,则从最一般的人文因素出发,以相当乐观的态度,只要信号带宽高于10 kHz,我们就可以适度地希望每10 kHz频带的传输速度为5 kbps。
声速平均为1,500 m / s。 这意味着对于每一个半公里的距离,与信号传播速度相关的延迟将增加1秒。
让我们了解这些数量。 如果我们有条件地传输某种请求,例如
10公里 ,那么我们可以在
14秒之内接受答案。 在其中一项实验中,预期响应信号会持续两分半多钟,因为 订户距离120公里。
现在,我什至没有谈到与声速高度依赖于水的密度有关的问题。 不同密度的水层不会在海洋中混合,声音可以从两层的边界完全反射出来,即 在某个地方,信号根本不会到达需要的地方。 没有任何明显的障碍。
噪声,多径和多普勒。 所有的海洋,海洋和河流都是嘈杂的。 低于10 kHz的频率特别强。 声音从底部反射,水下景观的细节,表面,反射在接收点处加总,波浪的轨迹由于折射而弯曲。 水声调制解调器可以保持数英里的联系,但彼此之间却相距一米,却无法通过密集的海草层听到彼此的声音。
如果我们尝试在深海中工作,那是很好的。 例如,深度为一公里,距离为10,按比例看似浴缸。 在下面的Wikipedia图片中,可以看到光线跟踪:

但是浅水域呢? 去年夏天,同事们在800米的距离内工作,深度为4米。 几何上-这是人行道上的水坑。 深度距离比200:1。 想象一下,声音会从底部反弹多少次,以及在接收点如何形成。
所有这些导致水声通信通道非常复杂且非常不稳定的事实。
传感器网络?
值班一词听起来像是我们不知道整个海洋的95%。 将一些“节点”放置在底部(甚至在水柱中)来测量一些环境参数,累积并根据需要将它们沿着链的某个位置转移是非常诱人的。 例如-在一艘经过它们上方的
军事科学船上。
此类零件在5到15瓦的传输模式下的平均实际功耗。 即使我们假设设备大部分时间都像贵族猫一样在梦中度过,但基于传输速度和通信会话的大概频率,很明显的是,如果电池寿命合理,则大部分设备将是电池。 。 几十公斤的锂,其中绝大部分都不会从底部提起,因为它会被污泥洗净,会随着贝壳而长大,会腐烂,总的来说在经济上是不利的。
请记住,这种东西根本无法一直,很好或至少经常不能像蜂窝或家用WiFi路由器那样工作,尽管它位于底部完全没有防御力,也没有任何保护措施。
在这里,我将举一个这样的传感器网络的例子。 好吧,这里是:
可以说,所有这些测试网络都位于海岸的“行”可访问性中。 全部属于欧洲项目
FP7-SUNRISE 。
下面是项目网站上的图表,说明了不同实验室和测试站点的位置和功能:

该项目的成功程度很难判断。
许多文章已经发布 。
总预算为
5 320 023欧元 。 思考者中包括许多欧洲大学,比利时北约科学技术中心。
项目状态-
2016年12月31日关闭 。
有许多不同的小型测试网络,大多数都是一次性事件。 以下是引起我注意的一对夫妇:
在我看来,主要问题在于,要真正使用带有有效载荷的此类部件,您需要将技术带入一种状态,即网络节点已准备好进行长距离太空飞行,不多也不少-被扔到水中-并在精神上告别。 电池和维护方面的任何繁琐事情都根本失去了意义的整体观念。
另一件事是不同的滑翔机!
波音的女儿Liquid机器人技术网站上的一张图片说明了所有这些项目的推动力:
关于什么是Wave-glider及其工作原理的精美视频:
什么只是滑翔机及其运作方式:
如果第一个具有可见的水面平台,则第二个可以潜水数周和数月
(一年多!)。在海洋中潜水,很少,很少在表面上冲浪。
国防技术的转换和实施并没有被取消,当然,我们可以希望如此。 无论如何,滑翔机和滑翔机-这是大规模的,很严重,而且需要很长时间。
但最重要的是......……一切都一方面与带有传送带盖的自动驾驶汽车的对抗,另一方面与核潜艇的对抗,唯一的不同是,在后者的情况下,每一个这样的“平等优先”的发射都被庆祝为公众假期。 好吧,用一块铁砸死它,只有每个人中都有数十名高素质的活泼潜水员。
那么水下步行和拳击呢?
类似于空中无人机,潜艇也不反对了解它们的位置,即使物体浸入水中,也能与它们保持联系也很好。
近年来,关于精确抵制对水下传感器网络和水下定位系统的某些短暂网络攻击的话题,仅出现了大量出版物。
这些文章的作者最喜欢的是欺骗,如何定义它以及如何处理它。
事情似乎非常简单-只需从卫星导航系统中获取一个模型,然后将光速更改为声速,这似乎是一个全新的科学技术领域。
让我们找出所有这些假设所基于的假设。
通常区分两种类型的喷水器-位于水面上的那些和位于水柱中的那些。 前者使用GNSS确定他们自己的坐标,而后者则使用他们必须面对的声纳导航系统。
通常,在出版物中,我们谈论的是一种需要妥协的远程水声导航系统。 但是我答应了神话和现实,因此我们将分析所有主要类型的声纳导航系统,以及如何克服或无法克服它们,甚至那些显然不适合定位水下网络节点(无论是移动的还是固定的)的导航系统。 我们假设攻击者知道信号的所有调制和解调算法,系统的所有延迟和时序,频率,编码和最小的细节。
这样啊
测距仪和测角仪系统
这些是测量到所需点的角度和距离以解决导航问题的方法。
对于这样的系统,可能有几种选择。
从测向天线的位置来看:
- 接待流动受害者
- 在固定的驱动信标上传输。 在这种情况下,天线应以移动受害者已知的方式相对于基点定向。
从确定距离的方法的角度来看:
- 请求-响应方法
- 通过预同步,发射驱动信标
- 启动“请求-响应”以进行同步,然后定期发出驱动信标
如果使用了请求-响应方法,则欺骗的唯一选择是比驱动器信标更靠近受害者。 这里的一切都非常简单-导航信号平均具有明显的持续时间,最后但并非最不重要的是,持续时间以距离(乘以声速)表示。
我们正在谈论的是数十万毫秒 大约几十米。 欺骗者必须接收信标请求信号并发出响应,以模拟所需的延迟,以形成受害者的欺骗者图像,使其与驱动信标相距多远。
由于受害者会客观地评估信号的到达角度,因此
无法更改信号的到达角度。 在这种情况下,冒泡者所能做的就是改变角度-只是在受害者的右边。
此外,冒泡者不得允许受害者的“假冒”信号与驱动信标的真实信号重叠的情况出现-在这种情况下,受害者极有可能根本不会收到任何信号。
虽然该计划规模很小,但从理论上讲甚至是危险的。 为什么它完全不起作用-稍后。
如果使用预同步方法,一方面,spoofer具有一定的作用范围-不必比驱动信标更靠近受害者,您可以简单地插入信标信号之间的周期性传输。
另一方面,它与驱动信标的发射时间更相关-可能是替换信号根本不适合实际信号之间的间隙。
如果请求在主同步时设法进行替换,则通过请求-响应方法进行主同步的选项以及驱动信标的后续传输再次为欺骗者提供了更多机会。
在驱动器信标上带有辐射相控阵天线的选件对受害者来说更加危险。 如果在以前的情况下无法更改信号的到达角度,则在此配置中,通过更改相控天线阵列不同元素之间的辐射延迟,可以在“受害者的意识”中形成任何所需的角度。
一切听起来都很合乎逻辑,而且很容易掉下来。
但是实际上,我上面描述的所有方法也完全无效。 暂时记住这一点。
测距仪系统
在绝大多数情况下,这里的参考点分布在表面或底部,受害人的坐标要么事先知道,要么被这些参考点不断传输。 同样,可能存在用于确定范围的所有先前选项-“请求-响应”,预同步等。
此处的所有内容都与测角仪系统非常相似,唯一的区别是,喷头必须与控制点过程中涉及的每个人最接近。 它以相同的方式获取受害者的请求信号,并在必要时替换当前参考点的坐标(回想一下,冒泡者知道所有调制解调方案和包裹格式!),尽其所能形成所需的延迟。 显然,在这种情况下,对扩音器的位置施加了严格的限制-它必须比所有参考点更近,甚至延迟也不能太大-存在在受害者身上重叠交换信号和真实信号的危险。
而且这种方案也几乎不能使用。
差异测距仪系统
几乎完全与以前的相似-参考点位于水面或底部,但是现在受害者没有辐射任何东西,而只是在听。 这种系统的运行完全重复了GNSS的思想-这两颗卫星都发送其位置,水声定位系统中的参考点则根据时钟与所有其他参考点同步发送其位置。
通常,由于某种原因,该系统被认为是最容易遭受欺骗攻击的系统。 最可能的原因是其工作基于与GNSS系统几乎相同的方程式。
因此,这里的一切都是根据相同的想法发生的,即喷洒器比真实参考点更靠近受害者,它会发送一个替换信号,以便在真实信号之前到达受害者。 因为 由于辐射的绝对矩不起作用,因此,喷洒器可以比参考点更早地传输信号。 仅信号到达受害者的时间差异很重要。
结论
乍一看,这三类系统似乎都容易受到欺骗攻击,这些论点有什么问题?
实际上,一切都非常简单:信号传播的明显低速在spoofer上发挥了作用。 为了在此更换东西,您不仅需要非常准确地知道您的位置以及控制点或驱动信标的位置,还需要知道受害者的位置!
哎呀,要解决导航问题,您必须首先至少解决三次导航问题!
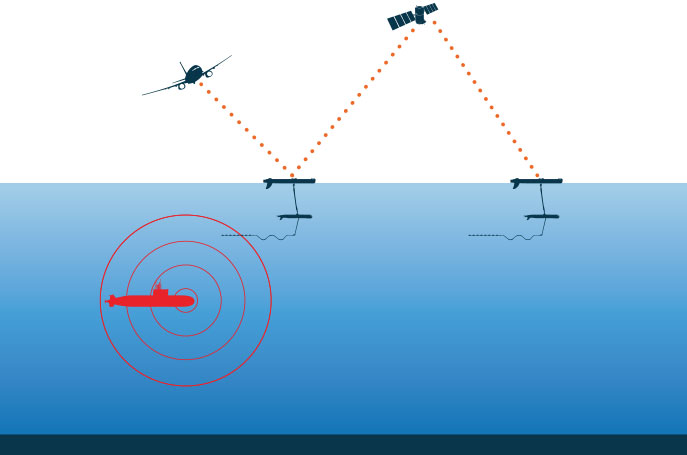
空中悬浮物知道“解放者”的飞行地点,并可以向其提供欺骗性GNSS数据。 在水下,这只能在视线内完成,也就是说,只有几米,在最乐观的情况下可能只有十几米。
但是这些出版物的作者真的错过了这么简单的细节吗?
当然不是 我认为他们完全了解所有内容。 在出版物的一部分中(主要在水下传感器网络上),根本没有提出这个问题,在其他方面,建议通过声纳来确定受害者在文章中的位置!
而且在水柱冒泡的情况下,水柱本身不知道它在哪里(例如,驱动测角仪系统不会以这种方式帮助他-这是为了能够到达它,而不是了解其绝对位置)。
如果这是表面喷水器,则他需要将天线降低到足够的深度,如果他想确定使用被动声纳或主动声纳的受害者的位置,则声纳的方向(悬挂在几十米的柔性电缆上)也需要能够以无法达到的精度进行跟踪。
不用说,水平回声定位的准确性原则上不足以进行足够的欺骗(不会变成干扰!),或者它(就像欺骗本身一样!)在水下简直令人着迷? 也许唯一的选择是,当冒充者确切知道受害者的位置时-当他与受害者身体亲密时,就像一条鱼缠在鲸鲨上。
考虑到我所写的有关海底网络节点和滑翔机的通信范围以及所有运行条件的信息,最可能的结果是什么?
- 如果距离很近(几百米-公里),那么他们会简单地游到将踏板车放到船上的人,并要求解释。
- 如果距离很远(几十公里),那么未经授权的(无意义的!)声纳点击就可以轻松响应“ 533rd frequency”。
主动在水下发光-至少在不谨慎的情况下,这就像夜间在打开车内灯的情况下开车时一样。我什至没有说水声仍然是声学,信号不需要复杂的记录设备,频谱上的一切都很明显,而且如果它是为长距离和低频而设计的,那也是可以听见的。因此,事实证明,在空气中有效的拳击-GNSS欺骗在水生环境中显得相当笨拙且毫无意义。真正与声学相反的所有因素-干扰,干扰以及再次干扰,效果越强-机会越大。好吧,或者只是游泳并用ottertkoy =)捡起来聚苯乙烯
我故意不提供出版物的链接,有兴趣的人可以轻松找到关于“水下声学欺骗”一词的文章。传统上,我将感谢建设性的批评,错误消息,建议和建议!