我是一名程序员,正如您可能想像的那样,花一些时间输入代码。 这项活动通常包括将思想从眼镜拱之间的空间转移到显示器后面的空间。 虽然神经接口很少见,但传统的要求使得打印非常困难,涉及大脑,眼睛,手,键盘,计算机和显示器。 我只想看显示器,而不看键盘。 同时,按下所需的键,加快打印速度,减少印章,手腕和手指移动少。
答案是符合人体工程学的键盘。 根据削减,生两个孩子的过程。 带孩子们离开屏幕,那里有场景technoporno。

在编程时,您可以打印代码,而不会抱怨速度,这不是瓶颈。 花更多的时间在思考上。 令人讨厌的是错别字-纠正它们时,想法就迷失了。 而且,查看按钮而不是屏幕并不有助于其返回。
看来我可以盲目打字,但我想窥视按键在哪里。 而且令人分心。 它似乎用所有十个手指打字。 但是现在,Y和B用左手按下,然后用右手按下。 现在要收获什么? 这也令人分心。 此外,观察者注意到他们通常用九个手指打印:一个很大的空间,然后用一个拇指按在上面。 即使它们交替出现,从这样的拇指中获得的好处/信息也很少。
我不仅得出结论,即传统键盘存在问题并开始解决它们。
- 这些行相对于彼此移位了键大小的一半或四分之一。 这是杠杆打字机的遗产。 因此,他们在严格的笛卡尔盒子中拿出了正骨器。
- 相同的列高,但手指长度不同。 然后,长手指的列向上移动。
- 大空间无法有效利用拇指。 我们将其分成单独的按钮,并将其称为tamb群集。
- 数字块会干扰鼠标。 带走! 它变成了Tenkeyless。
- 大面积上的许多按钮使画笔移动。 作为响应,按钮被切断,无法从原始位置(ASDF JKL;)触及。 出现了60%,40%,20%的速记键和两键键盘。
- 薄膜键盘提供较弱的触觉和听觉反馈。 因此,尚不清楚是否有必要进一步按下键或是否可以继续前进。 我们回到了旧的灯泡技工,有时会大声点击。
- 布局远非最佳,也远不及用弱手指触碰到的频繁按钮。 当存档器压缩文件时,根据统计数据,新的布局使手指移动受到抑制。
- 手从肩膀而不是胸部伸出,因此您必须弯曲手。 锯切的两半旋转或置于肩宽。 他们称它为分裂。
- 键被标记,这会引起窥视。 这里的一切都很简单-不要贴标签!
- 每个人都不一样,每个人都有自己完美的键盘。 他们开始制造符合人体工学的键盘。 我开始做。
第1集
从这些附加条件开始:
- 无背光。 更轻松,更省心。
- 铰接安装,无需印刷电路板。 这消除了额外的技术阶段,该阶段可能需要很长时间才能掌握,也可能需要很长时间才能交付。
- 单分裂,即两半被空间隔开,但是在一种情况下。 然后,如果一只手放在键盘上,则可以另一只手放在不看的位置。 而在分手中,下半场的目标尚不清楚。 受到质疑的是,手臂的肩宽是否有损于简单性。
- 内置腕托。 看起来很方便。
- 尺寸不超过30厘米x 20厘米,适合安装在我的台式CNC铣床上。
- 44个按键,仅供初学者使用,而俄式布局不适合较小的按键。
- 按键之间的间距为标准19毫米,尺寸18毫米和1毫米间隙。
- 材料是木头。 它看起来原始,漂亮,触感很好,而且房屋中的灰尘和刨花比其他任何东西都要好。

首先,他将手指放在一张纸上并标记了笔尖。 在橡皮泥上做同样的事情。 他用铅笔画了纽扣,并测量了距离。 我将图形传输到矢量编辑器,在其中进行修剪和打印。 我以想到的其他方式重复了几次。 我订购了开关和盖,当它们打开时,我开始将它们转移到CAD。 我尝试了几个程序,发现它们很好,但实际上不是很好-您需要用鼠标拖动所有内容。 事实证明,该脚本更容易。 通过CAD,我只需要可视化脚本,测量距离并生成gcode (CNC铣床末端将沿着其飞行的 3D矢量路径)。 我真的很喜欢ImplicitCAD的思想,但就gcode而言,它是潮湿的。 其他CAD很难生成gcode,而gcode不会在同一位置长时间飞行多次。

我将简要介绍gcode如何转变为刀具运动。 铣刀插入到位于入口处的铣刀夹头中,并随车架一起在我们自己的三维笛卡尔空间中移动。 滑架通过旋转螺丝移动。 螺丝由步进电机旋转。 步进电机旋转,被其极点吸引到线圈,电流沿一个方向流过,而电流沿另一方向推离线圈。 电流大,微电路小,无法应付其控制。 这是由步进电动机的驱动器完成的,该驱动器每次在输入端以低电流接收2位STEP(无论是否需要迈出一步)和DIR(左或右),并在输出端在电动机绕组中提供所需方向的大电流。 事实证明,对于三个引擎,您每秒需要6位30,000次,然后将其取出并实时地进行处理。 如果您没有时间,则将出现不同步,并且切割器将到达森林,即不需要的树,而不是预期的轨迹。 对于台式计算机,硬实时控制是一个实际问题。 但这不是因为处理器能力不足,而是因为操作系统参与回收,因为它的多余资源导致任务之间每秒切换1000次。 当您切换时,尚不清楚确切的Sheduler想要什么。 因此,STEP / DIR信号是在grbl固件的控制下由Arduinka上的微控制器生成的,并且相同的gcode接收输入。 但这是另一个问题:gcode可能是兆字节,而Arduin上的内存只有几千字节。 我们必须通过USB少量喂食,如何吃一块,再换一个。 好处是您不再需要硬实时输入,而是以软实时输入,而常规的bCNC笔记本电脑可以很好地完成这一工作。

关于工件如何变成产品的一些知识。 木制的牺牲桌用螺栓固定在机器的金属桌上,因为这不是什么遗憾。 工件已附着在其上。 首先用大直径立铣刀将材料去除,然后在拐角处移至小立铣刀上。 但轮廓通过角铣或圆形倒角穿过倒角。 用球磨机加工光滑的曲面。 每次更换磨机后,都需要设置原点的高度。 每个段落的开始都是非常关键的时刻。 必须降低速度并仔细监控切纸器。 如果她开始变质或行为异常,则迫切需要停止该过程,直到工件或切刀不可逆转地损坏为止。 例如,铣刀可能会更深,撕下工件,不旋转,冒烟,产生灰尘而不是切屑,沿着不同的路径飞行,直径或轮廓不正确。 然后将工件从第二面翻转过来并以相同的方式进行处理。 仪器总共变化十次。 在加工结束时最关键的时刻,即将完成的产品靠在薄的支撑物上,很容易拉出。 我们必须重新开始,因为后背是牢固的,而且绝对没有粘着并且没有完成。 铣削过程与在产品上进行调试非常相似,因为错误是即时修复的,而且价格很高。


该机壳的第一个调试原型是用松木制成的,因为他知道我会破坏它的。 第二个已经是山毛榉了。 有几个小错误:更换后我没有抬起切刀,它飞了一点,损坏了工件,当设置初始高度时,我用切刀刺穿了工件。 身体磨了一天。 然后半天完成文件。

下一步是通过安装焊接。 我曾经以为我不能焊接。 但是事实证明,烙铁不知道如何焊接。 温度可控的焊台可完成奇迹并自行焊接。 您只需要将钉子放在正确的位置,涂上助焊剂,然后带上焊料即可。 任务是将按钮连接到芯片上。 但是按钮是44个,Pro Micro的管理引脚只有18个。同时,导体的两端-电流流入和流出。 有的让它们成为行,有的让它们成为总数不超过18的列。这些末端可以分别控制。 电压施加到整个行,并从每一列依次读取。 一个按下的按钮将跳过它,我们将阅读它,如果未按下,则不会跳过。 它们的组合数是通过乘法运算得到的,也就是说,我们的Pro Micro最多可以使用9 9 = 81个按钮。 您需要44个按钮。 您可以选择11 4,但6列8行(左侧4行,右侧4行)更适合我。 该方案很简单,再次向笛卡尔打招呼,这次是2D模式。 同时按下3个按钮时,将显示花样。 电流将开始从行到列再到行进,似乎第四个按钮(也就是三个被按下的正方形)也被按下了。 为了使电流从行流向列而不是流向二极管,增加了二极管。 作为行的总线,使用二极管本身的导体,对于列,则需要一根绝缘的电线,以使行之间不会发生短路。 最困难的部分是将行和列附加到Pro Micro,因为没有足够的空间。


我将购买的球形帽放在按钮上,但我不喜欢它们-手指的边缘被切成锐利的边缘。 他画了几天,一天喝了自己的酒。 他把腿弄成5.5毫米。 我担心它会折断,但它们会紧紧抓住。

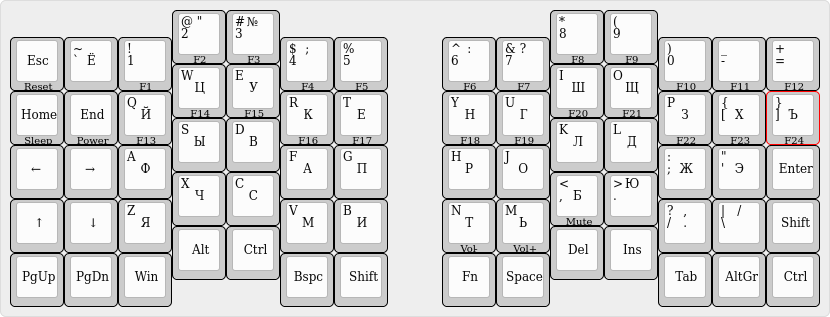
轮到固件了。 我已经写了很长时间了,所以我选了QMK 。 要配置它,您需要指定键盘上有多少行和多少列,它们连接到哪些引脚,二极管的旋转方式(从行到列,反之亦然),如何在行(4个)上显示电行(8个)和列(6个) )和布局的列(14个),以及布局本身。 布局设置过程可以一直持续下去,我从QWERTY开始。 分为3层。 在常规键盘上很少见到层。 Fn层通常将数字与笔记本电脑键盘上的媒体键结合在一起。 但是,当只有44个键时,就不能没有层。 除了图层之外,还有其他方法可以为同一按钮分配不同的值。
在Linux下,为了填充固件,您需要禁用一项服务并组装项目,并指定配置。
sudo systemctl disable ModemManager.service
sudo make gor:default:avrdude
RST . .

. .
.
2
. , , . .

, . , , . . , . , , . , 19 . . .
- .
- 70 , , .
- 16 , . 0.5 .
- 2 , , 4 .
- .
- .
- .
- .
- Kailh.
- Gateron Clear , .
- Gateron Blue Silent Brown .

70 , 44, . Pro Micro - .
QWERTY, Colemak .

.
- , . , .
- 135 . , .
- . .
- , , .
- . .
- .
- .
- , . 2 , , .
- , .
- , .
.

, .