第二季
游艇物理学或物理学家游艇
在舵手学校接受培训的过程中,经验丰富的从业者告诉我们,真正的游艇驾驶员如何看待“粉红色”风,在一处感觉到直角,完全不受空间克汀病的影响。 显然,物理学领域的教育阻止人们看到“粉红色”风,并使一个地方的敏感度降低。 我将尝试弄清楚游艇如何移动。
您需要数字化游艇吗?
- 牵引特性
- 稳定性图
- 帆几何-实时测量
顶角高度 hgrtop=1,120万美 ;
石窟the角的高度 hgrhls=19.85亿美 ;
倾斜角 hgrpc=21.79m ;
主帆倾斜角度与桅杆的距离 lgrpc=296万美 ;
顶撑高度 hsttop=10m ;
堆垛机钉高 hstsls=11.11亿美 ;
倾斜角 hcst=150万美 ;
石窟面积 Sgr=17.2m2 ;
停留区 Sst=14m2 ;
船体侧帆区 Sanf=7.315m2 ;
船体的正面风阻面积 Sfr=3m2 ;
水下物体区域的侧面投影 Sdnw=1.82m2 ;
龙骨和骨面积 Sks=2.33m2 ;
最小可能的风帆角度 psict=18o 。
也许这对我来说真是太不幸了,但是在我寻找游艇的过程中,没有一家制造商同意(无法)提供他们游艇的数据。 我确信游艇的设计师可以掌握所有这些信息,但是由于某种原因我无法获得。 我自己去挖。
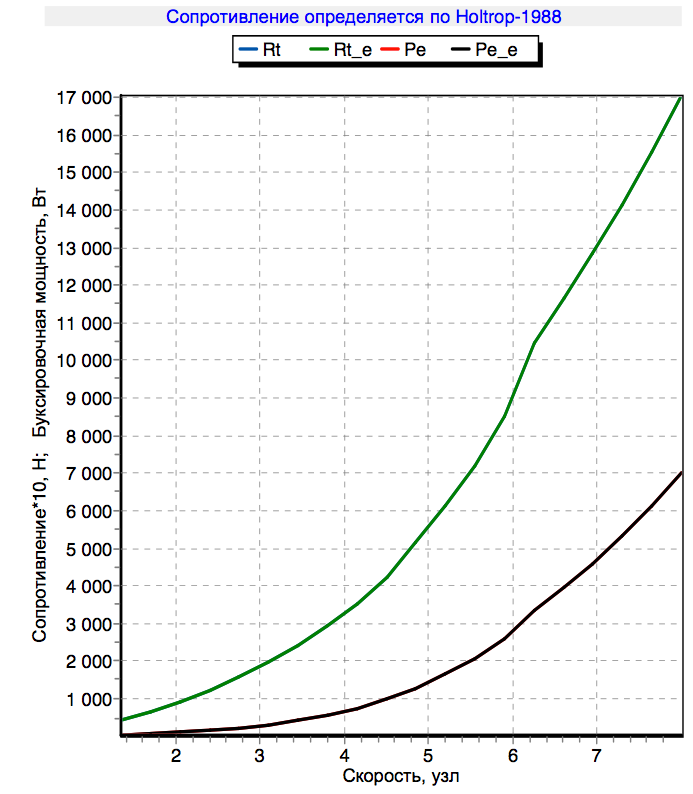
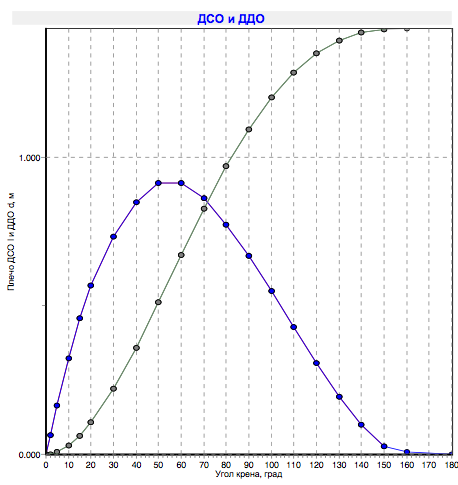
我已经通过在自由航行计划中对游艇进行数字化处理而获得了拖曳特性,作为坚持不懈的回报,该计划立即给出了稳定性图,重心和横向阻力中心,以及许多其他有用的几何信息。 稳定性图显示您需要向游艇施加多少扭矩才能使其倾斜一定角度。
收集所有必要的参数,让我们继续进行计算。
显然,前进时,游艇克服了逆风的阻力。 逆风速度等于游艇的速度,但方向相反。 我在选择电动机时已经使用了这个比喻。
Rfw=0.61∗Sfr∗v2,H,
其中v是船速。
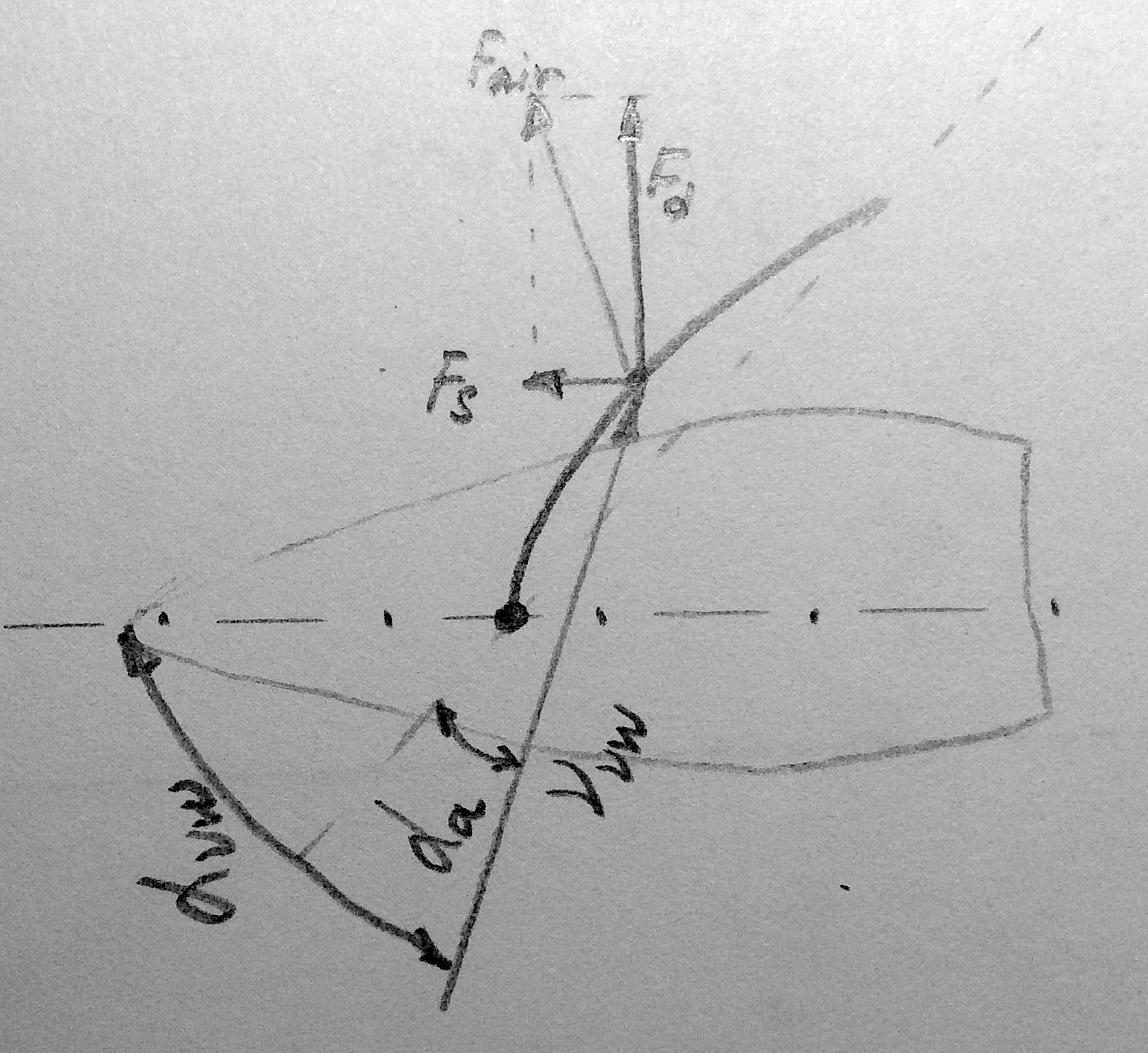
同时,真实风的作用力作用在游艇上 Frw 以一定角度吹 alpharw 。 这两种风都产生的力等于分力的矢量和。 所谓的三角旗风-船上吹来的风。
主要问题是相对论。 观察者(和所有测量仪器)在游艇上,对他而言,无法测量真实风的强度和方向,但他可以测量方向- alphavw 和三角旗风速- vvw 以及方向- alpha 用车载指南针和船速测量- v 由车载滞后(速度计)测量。
我根据车载仪表的测量值找到了实际的风参数。
vrw= sqrtv2+v2vw−2∗v∗vvw∗cos( alphavw) -实际风速;
alpharw= pi−arccos( fracv2rw+v2−v2vw2∗v∗vrw) -实际风的角度从“向前”方向推迟。

对于小的pokatushek,所有这些都是没有意义的。 要计划足够长的行程(当目标不在直接视线范围内时),必须将真实风和三角风连接起来。 毕竟,计划是在带有真实风的行星地图上进行的(根据天气预报),并且游艇的运动来自三角旗。
现在已经建立了与现实的联系,是时候弄清楚驱动力是如何产生的了。 显然,风充满了帆,而船沿着海浪奔跑。
实际上,游艇上的帆以两种主要模式运行:
- 气动机翼模式-用于逆风,
- 气动制动模式-用于大风。
帆的轮廓缝制成充满逆风,呈机翼形状。 也就是说,机翼相对于空气以一定速度运动-因此,在其中产生了升力 Fair 。 与飞机机翼类似,我将尝试简化其尺寸和相对于游艇的方向。
为了使风帆采用其工作形式,有必要相对于风向稍微旋转一下。 旋转角度称为“迎角” alphaa 。 为了简化计算,将机翼与平板进行比较,并以空气动力学系数表的形式表示差异,其中Su是升力差异系数,Cx是阻力差异系数。 提升力垂直于板,阻力为平行。 板的几何形状由空气动力学伸长系数决定 Ay=h2/S h是帆的高度; S是帆的面积。
与板相比,机翼是三维结构,因此,单独的表格显示了“腹部”凸起的大小如何影响与板的差异系数。
帆力投影 Fair 垂直于游艇的纵向-有用功率:
Fs=0.61∗v2vw∗S∗((Cy+Cy3)∗sin( alphavw)−(Cx+Cx3)∗cos( alphavw)) 。
帆力投影 Fair 在游艇的横向上-漂移力:
Fd=0.61∗v2vw∗S∗((Cy+Cy3)∗cos( alphavw)−(Cx+Cx3)∗sin( alphavw)) 。
船体的风力阻力会减慢运动速度:
Rfw=0.61∗Sfr∗v2vw∗sin( alphavw)
收到力的投影后,我可以找到游艇的纵向和横向速度矢量。 速度的纵向分量 vdp 我根据时间表找到牵引特性。
有了横向分量,一切都会变得更加复杂。
首先,您需要找到风帆中心的高度。 帆是一个三角形,其中一侧是凸弧。 我将它作为两个帆呈现:三角形和镰刀形。 三角形的面积被计算为宽度乘以高度的乘积的一半,而“镰刀”的面积是帆面积与三角形的面积之差。
S=(hgrtop−hgrhls)∗lgrsht/2,
在哪里 S镰刀=Sgr−S
帆中心高度:
hgrcp= frachgr Deltacp∗S Delta+((hgrtop−hgrpc)∗Ssickle/1,8)Sgr,
在哪里 hgr Deltacp=hgrpc+(hgrtop+hgrpc−2∗hgrpc)/3, 没有镰刀的帆三角帆中心的高度。
通常,一艘游艇有两个帆:主帆是主帆,前帆是帆。 通常在没有镰刀的情况下进行下帆,然后再下帆到帆中心的高度:
hst Deltacp=hstst+(hsttop+hsthls−2∗hstsht)/3
总帆船中心:
h Sigmacpu= frachgrcp∗Sgr+hct Deltacp∗SctSgr+Sct
现在,我可以确定作用在游艇上的横倾力矩:
Mkr=Fd∗h Sigmacp
从稳定性图中,我可以找到游艇的角度 phi 。
我表达游艇漂移的力量:
Rd=9.8∗102∗(Sks∗atan( fracvdvdp)∗v2dp∗(cos( phi− gamma)−cos( phi+ gamma))∗0.96+(Sks+Sdpw)∗1.15∗v2d∗cos( phi− gamma)),
两龙骨游艇的龙骨相对于垂直方向的角度在哪里?
风压在车身上会产生额外的漂移。
Fanf=0.61∗v2d∗Sanf∗cos( alphavw)
速度 vd 是半师替代,直到力量平衡 Fd+Fanf=Rd 。
现在很明显,游艇“倾斜”移动,即 具有横向和纵向移动速度。 这带来了另一个惊喜。 方向- alpha 用车载指南针和船速测量- v=vdp 车载滞后(速度计)测量的结果仅显示纵向分量。
有必要将维度附加到现实中。 船的真实角度 alphareal 称为“跟踪角”:
alphareal=atan( fracvdvdp)+ alpha
可能与实测值相差10-20度。
游艇的真实速度可由勾股定理确定:
vreal= sqrtv2dp+v2d
最后,我将举例说明我的船最有趣的情况-逆风运动。 很明显,您不会严格遵循帆的风向,但可以以一定的角度旋转。
您需要从前帆开始-帆索安装在桅杆的顶部,与游艇船头的前角,以及后部,并有一条(软电缆)穿过滚轮到达绞盘。 它的张力调节帆相对于游艇的角度。 最小安装角度 psistmin=18o 在最大纸张张力下获得。 气动拉杆 Ayst=h2st/Sst=$5. 。 使用线性插值方法,我找到了最佳的迎角 alphaa=10o 从空气动力学系数表。 最优标准-最大化 Fsst 其中Su = 1.17; Cx = 0.15。 以这种方式安装的风帆将在锦旗风的方向上有效工作 alphavw= psict+ alphaa=18+10=28o 。 风速为5-7 m / s左右时,游艇航行天气良好。 为了数字的美丽,我会采取 vvw=6.55m/s 。
拉力在游艇纵向上的投影是有用的力:
Fsst=0.61∗6.552∗14∗((1.17+0)∗sin(28∗ pi/180)−(0.15+0)∗cos(28∗ pi/180))=153.5H
拉索力在游艇横向上的投影-漂移力:
Fdst=0.61∗6.552∗14∗((1.17+0)∗cos(28∗ pi/180)−(0.15+0)∗sin(28∗ pi/180))=405.8H
船体的风阻会阻止其向前运动。
Rfrw=0.61∗6.552∗3∗cos(28∗ pi/180)=69H
根据拖曳特性,我们确定速度 vdp=$2.7 节点= 1.4 m / s
hst Deltacp=1.5+(10+1.5−2∗1.1)/3=4.6m
Mkrst=405.8∗4.6=1867N/m ,从稳定性图中我们可以找到后跟的角度 phict=3.9o 。 好吧,这些都是小事,因此我们将再增加一个帆-主帆!
主帆像飞机机翼上的襟翼一样工作,并围绕桅杆旋转一定角度 70o 。 主帆的空气动力学加长系数 Aygr=h2gr/Sgr=$4. ;
最佳迎角 alphaa=10o ; Su = 1.09; Cx = 0.15。
石窟otto力在游艇纵向上的投影是有用的力:
Fsgr=0.61∗6.552∗17.2∗((1.09+0)∗sin(28∗ pi/180)−(0.15+0)∗cos(28∗ pi/180))=170H
洞穴的力在游艇横向上的投影为漂移力:
Fdgr=0.61∗6.552∗17.2∗((1.09+0)∗cos(28∗ pi/180)−(0.15+0)∗sin(28∗ pi/180)))=464H
h Sigmacpu=4.16m , Mkr=3127H 横滚角 phi Sigma=8.5o 。
总前向力:
Fs=Fsst+Fsgr−Rfrw=153.5+170−69=254H 前进速度 vdp=$3. 节点或1.86 m / s。
如果我们假设实际风严格向北吹,那么船上的指南针将显示游艇速度的纵向分量的角度 alphavw=38.1o 。
漂移速度将是 vd=0.418m/s 。
现在我们需要将这些结果变为现实。
实际运动的跟踪角将为:
alphareal=atan( fracvdvdp)+ alpha=atan( frac0.4181.86)+38.1=51o ,这是真实风的角度 alpharw 游艇的运动矢量。
以及太空中真实的运动速度: vreal= sqrtv2dp+v2d = 1.92 + 0.4182 = 1.9 m / s。
实际风速:
vrw= sqrtv2+v2vw−2∗v∗vvw∗cos( alphavw)=5m/s 。
在这种情况下,严格逆风前进的速度将为1.2 m / s或2.35节,而您将不得不沿着曲折的路径移动-大头钉。 
在计算出锦旗风的其他可能角度之后,您可以得到一个圆形的定位图,该图显示了游艇的实际速度与真实风的关系。 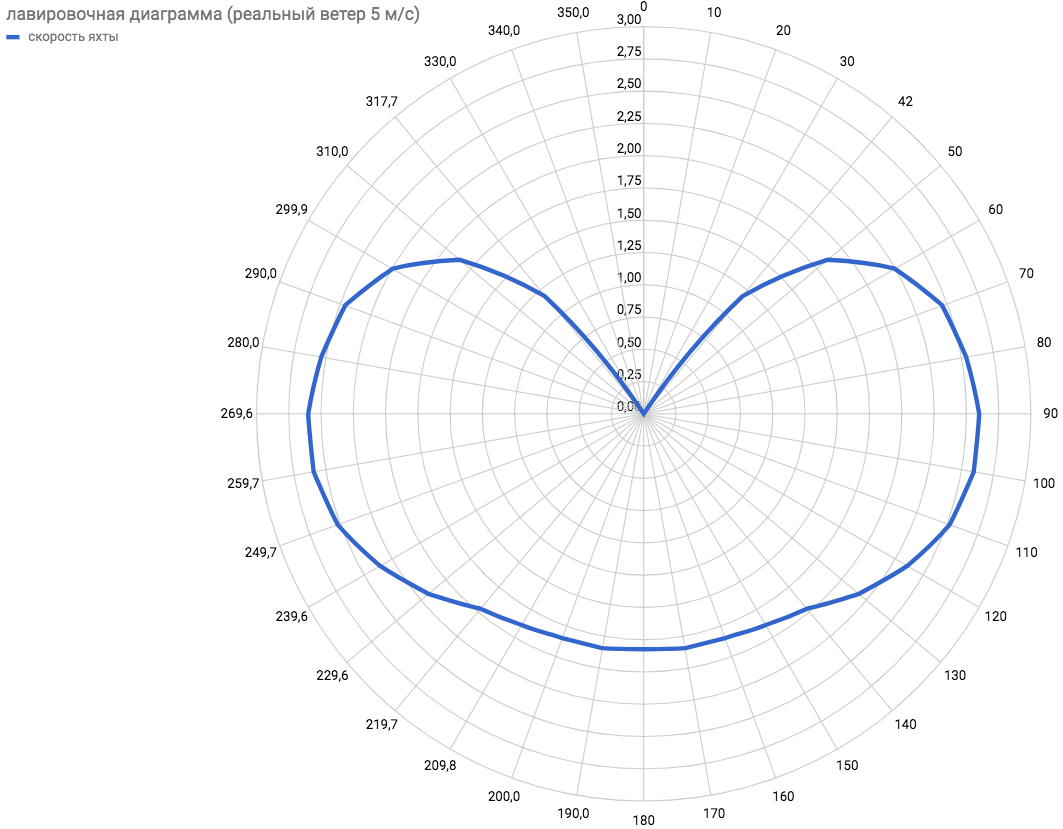 使用它,您已经可以根据天气预报在地图上计划路线。 另外,很明显,最小可能的角度 alpharealmin=43.5o ,并通过航向角获得最大的逆风速度 50o< alphareal<53o 对于风5 m / s。
使用它,您已经可以根据天气预报在地图上计划路线。 另外,很明显,最小可能的角度 alpharealmin=43.5o ,并通过航向角获得最大的逆风速度 50o< alphareal<53o 对于风5 m / s。