不过,俄罗斯政府倾向于废除俄罗斯路线上未定义的20 km / h的“储备”,因此我们决定谈论现代警用雷达的工作原理。 在这篇文章中,您将找到对多普勒效应的描述,这是大多数雷达工作的基础,并精确计算了您可以在高速公路上行驶的速度而无需担心罚款。
当人们谈论多普勒效应时,我总是记得古老的苏联玩笑。
有一次,科学家开了红绿灯,被一名检查员拦下。
-你在打破吗? -检查员问
足智多谋的科学家决定炫耀他的知识。
“一点也不,督察同志。”
-为什么要去红色交通灯?
-你看,由于多普勒效应,在我看来是绿色的
检查员还接受了技术教育,并剥夺了科学家的天文超速驾驶执照。
现象的实质
实际上,到处都可以观察到多普勒效应-从运动物体或运动物体记录的电波频率变化的现象。 对于声音和电磁波都是如此(当然,要进行某些校正)。
有了多普勒效应,我们在生活中会不断遇到,例如,当我们听到警笛声响起然后发出警笛声时。 起初,声音似乎较高,然后-相反,声音较低。 从理论上讲,早在1842年,奥地利物理学家就证明了这一点,今天,这种效果已应用于科学和技术的许多领域-从太空研究到向驾驶员处以罚款。
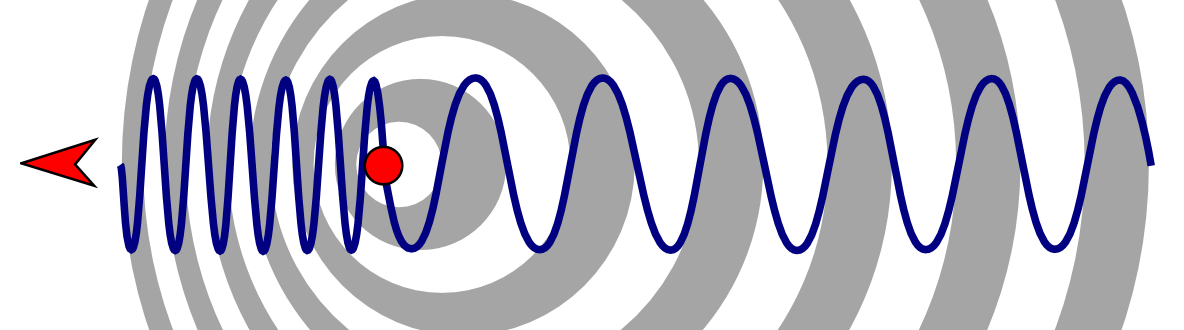
多普勒效应可以简述如下:一个物体相对于另一个物体的运动导致这样一个事实,波峰以延迟(或超前)的方式从信号源到达接收器,从而导致信号频率发生变化。
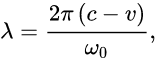
因此,检测到的辐射的波长由公式确定(所有计算都可以在
Wikipedia上找到,但是如果您太懒了,我们也将其移至此处)。
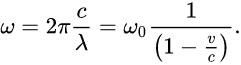
固定接收器注册的频率由公式确定
警用雷达
在警用雷达的情况下,我们谈论的是无线电波,因此,在计算公式中未考虑参数C-信号在物理介质中的传播速度。 取而代之的是使用相对论的一种特殊理论,该公式采用以下形式:
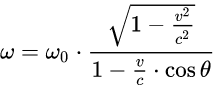
在这个公式中,C是光速,V是光源相对于接收器的速度。 θ余弦值反映了接收器参考系中指向信号源的方向与速度矢量之间的角度。
警用雷达既是信号源,又是接收器,它记录反射的射频辐射的频率。
大多数现代雷达都在K波段工作,这意味着它们以大约24.15 GHz的频率发射辐射。 从移动物体反射的信号具有不同的频率。 为了确定汽车的速度,将差减半,并根据上述公式计算相对径向速度。
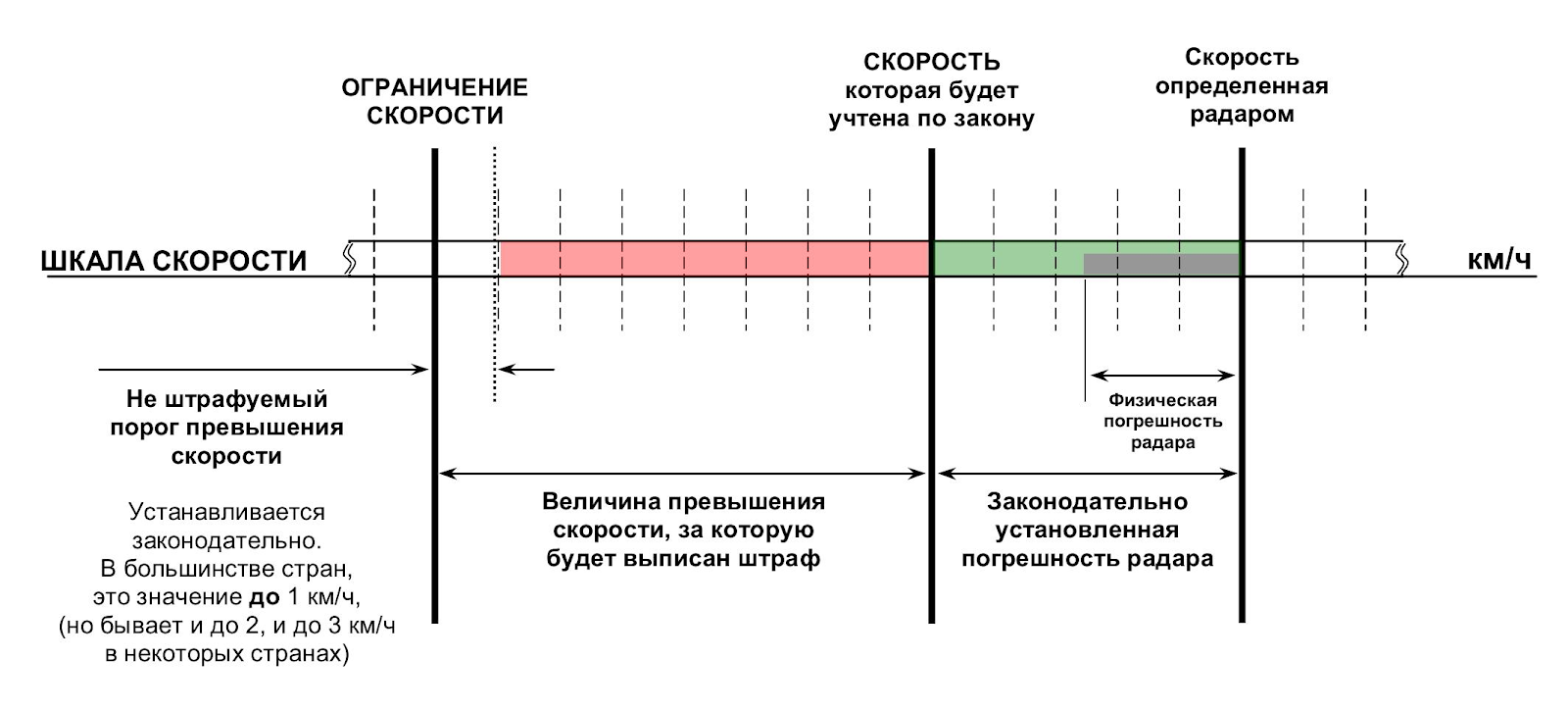
现代雷达的制造商(例如ARROW)声明的误差不超过1 km / h,而KRIS-P的误差为1 km / h。 较旧的雷达型号可能会有高达2 km / h的误差。 不再使用精度更高的雷达
因此,事实证明,在大多数情况下,如果您的汽车的雷达速度进入雷达视场,则将以2 km / h的精度进行确定。 在这种情况下,雷达不会考虑垂直定向的速度分量。 也就是说,在转弯行驶以及在丘陵地形上行驶时,垂直于连接雷达和汽车的直线,记录的汽车速度越低,运动方向的分量就越大。
如果移动沿直线发生,而没有改变仰角和转弯,则可以考虑。 在给定“再保险”因素的情况下,雷达记录您的速度,在最坏的情况下为+2或+5 km / h。
但是,不要认为每小时的公里数单位可以由汽车的速度表确定。 如今,制造商特别高估了里程表,以提高交通安全性。 即使您认为自己以100 km / h的速度行驶,实际上,实际速度可能不会超过90 km / h。
这就是为什么使用具有内置GPS接收器的设备(例如带GPS通知器的DVR,例如Playme Sigma,雷达探测器(例如Playme Silent 2或Playme Hard 3)或组合设备(例如Playme P570))来有效确定速度的原因。 根据卫星数据,您可以确定实际速度并以允许的方式尽快移动。
法律与罚款
如今,在俄罗斯联邦,法律规定了20 km / h的非罚款门槛(在不久的将来可以降低到10 km / h),如果您超出此限制的速度,则可以避免罚款。 也就是说,如果您以每小时15-18 km / h的速度行驶(不久以后将增加5-8 km / h),则不必担心罚款。 否则,相机错误可能对您不利。
在欧洲,罚款的形成机制略有不同。 不同国家/地区对速度违规设置了不同的阈值。 在这些阈值下,仪器错误已得到“保护”。 例如,在奥地利,固定激光雷达的参数为3 km / h,固定无线电雷达的参数为5 km / h,移动雷达为7 km / h。 在比利时,法国和意大利-各种类型雷达的时速为5 km / h。 在芬兰,考虑到违反7 km / h +雷达误差的情况,在塞尔维亚,甚至对超过1 km / h的罚款也处以罚款,而不考虑雷达的误差。 那是不值得超频太多的地方。